Глава 15
СПЕЦИАЛЬНАЯ
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
§ 1. Принцип относительности
§ 2. Преобразование Лоренца
§ 3. Опыт Майкельсона — Морли
§ 4. Преобразование времени
§ 5. Лоренцево сокращение
§ 6. Одновременность
§ 7. Четырехвекторы
§ 8. Релятивистская динамика
§ 9. Связь массы и энергии
§ 1. Принцип относительности
Свыше двухсот лет считалось, что уравнения движения, провозглашенные Ньютоном, правильно описывают природу. Потом в них была обнаружена ошибка. Обнаружена и тут же исправлена. И заметил ошибку, и исправил ее в 1905 г. один и тот же человек — Эйнштейн.

Второй закон Ньютона, выражаемый уравнением

безмолвно предполагал, что m — величина постоянная. Но теперь мы знаем, что это не так, что масса тела возрастает со скоростью. В формуле, исправленной Эйнштейном, m появилась в таком виде:
Здесь «масса покоя» m0— это масса неподвижного тела, а c — скорость света (примерно 3·105 км/сек).
Для кого теория нужна лишь для решения задач, тому этой формулы будет вполне достаточно. Больше ничего от теории относительности ему не понадобится; он просто введет в законы Ньютона поправку на изменяемость массы. Из самой формулы очевидно, что рост массы в обычных условиях незначителен.
Даже если v — скорость спутника (около 8 км/сек), то и при этих условиях v/c =3/105; подстановка этой величины в формулу показывает, что поправка к массе составит не более одной двухмиллиардной части самой массы, что, пожалуй, заметить невозможно. На самом деле, правильность формулы подтверждена наблюдением движения разнообразных частиц, скорость которых практически вплотную подходила к скорости света. В обычных условиях рост массы незаметен; тем замечательней, что он сперва был обнаружен теоретически, а уж после открыт на опыте. Хотя для достаточно больших скоростей рост может быть как угодно велик, открыт он был не таким путем. Закон этот в момент своего открытия означал лишь едва заметное изменение в некоторых цифрах. Тем интереснее разобраться, как сочетание физического размышления и физического эксперимента вызвало его к жизни. Вклад в это дело внесло немалое число людей, но конечным итогом их деятельности явилось открытие Эйнштейна.
У Эйнштейна, собственно говоря, есть две теории относительности. Мы будем здесь говорить только о специальной теории относительности, ведущей свое начало с 1905 г. В 1915 г. Эйнштейн выдвинул еще одну теорию, называемую общей теорией относительности. Она обобщает специальную теорию на случай тяготения; мы не будем ее здесь обсуждать.
Принцип относительности впервые высказал Ньютон в одном из следствий из Законов Движения: «Относительные движения друг по отношению к другу тел, заключенных в каком-либо пространстве, одинаковы, покоится ли это пространство или движется равномерно и прямолинейно без вращения». Это означает, к примеру, что при свободном полете межпланетного корабля с постоянной скоростью все опыты, поставленные на этом корабле, все явления, наблюдаемые на нем, будут таковы, как будто он покоится (конечно, при условии, что наружу из корабля выходить не будут). В этом смысл принципа относительности. Мысль эта — довольно проста; вопрос только в том, верно ли, что во всех опытах, производимых внутри движущейся системы, законы физики выглядят такими же, какими они были бы, если бы система стояла на одном месте. Давайте же сначала посмотрим, так ли выглядят законы Ньютона в движущейся системе. Для этого нам снова понадобится помощь наших молодых людей — Мика и Джо.
Пускай Мик отправился вдоль по оси х с постоянной скоростью u и измеряет свое положение в какой-то точке, показанной на фиг. 15.1. Он обозначает «x-расстояние» точки в своей системе координат как х'. Джо стоит на месте и измеряет положение той же точки, обозначая ее x-координату в своей системе через х. Связь между координатами в двух системах ясна из рисунка. За время t начало системы Мика сдвинулось на ut, и если обе системы вначале совпадали, то
x'=x-ut, у'=у,
z'=z, t' =t. (15.2)
Если подставить эти преобразования координат в законы Ньютона, то законы эти превращаются в такие же законы, но в штрихованной системе; это значит, что законы Ньютона имеют одинаковый вид в движущейся и в неподвижной системах; потому-то, проделав любые опыты по механике, и нельзя сказать, движется система или нет.
Принцип относительности применялся в механике уже издавна. Многие, в частности Гюйгенс, пользовались им для вывода законов столкновения биллиардных шаров почти так же, как мы в гл. 10 доказывали сохранение импульса.
В прошлом столетии в результате исследования явлений электричества, магнетизма и света интерес к принципу относительности возрос. Максвелл подытожил в своих уравнениях электромагнитного поля многие тщательные исследования этих явлений. Его уравнения сводят воедино электричество, магнетизм, свет. Однако уравнения Максвелла, по-видимому, не подчиняются принципу относительности: если преобразовать их подстановкой (15.2), то их вид не останется прежним. Значит, в движущемся межпланетном корабле оптические и электрические явления не такие, как в неподвижном; их можно использовать для определения его скорости, в частности определить и абсолютную скорость корабля, сделав подходящие электрические или оптические измерения. Одно из следствий уравнений Максвелла заключается в том, что если возмущение поля порождает свет, то эти электромагнитные волны распространяются во все стороны одинаково и с одинаковой скоростью с=300 000 км/сек. Другое следствие уравнений: если источник возмущения движется, то испускаемый свет все равно мчится сквозь пространство со скоростью с. Так же бывает и со звуком: скорость звуковых волн тоже не зависит от движения источника.
Эта независимость от движения источника света ставит интересный вопрос. Положим, что мы едем в автомашине со скоростью и, а свет от задних фар распространяется со скоростью с. Дифференцируя первую строчку в (15.2), получаем

Фиг. 15.1. Две системы координат, находящиеся в равномерном относительном движении вдоль оси х.
Это означает, что, в согласии с преобразованиями Галилея, видимая скорость света по измерениям, проведенным из автомашины, будет не с, а с — и. Например, скорость автомашины 100 000 км/сек, а скорость света 300 000 км/сек, тогда свет от фар будет удаляться с быстротой 200 000 км/сек. Во всяком случае, измерив скорость света, испускаемого фарами (если только справедливы преобразования Галилея для света), можно узнать скорость автомашины. На этой идее основывалось множество опытов по определению скорости Земли, но ни один из них не удался: никакой скорости обнаружено не было. Вы скоро познакомитесь очень подробно с одним из таких опытов. Вы разберетесь, что в нем случилось и в чем было дело. Что-то неладное творилось в ту пору с уравнениями физики. Но что именно?
§ 2. Преобразование Лоренца
Когда стало ясно, что с уравнениями физики не все ладится, первым долгом подозрение пало на уравнения электродинамики Максвелла. Они только-только были написаны, им было всего 20 лет от роду; казалось почти естественным, что они неверны. Их принялись переписывать, видоизменять и подгонять к тому, чтобы оказался выполненным принцип относительности в галилеевой форме (15.2). При этом в уравнениях электродинамики появились новые члены; они предсказывали новые электрические явления, но эксперимент никаких таких явлений не обнаружил, и пришлось отказаться от попыток изменить уравнения Максвелла. Постепенно всем становилось ясно, что максвелловы законы электродинамики абсолютно правильны, а загвоздка в чем-то другом.
Между тем Лоренц заметил одно замечательно любопытное явление: когда он делал в уравнениях Максвелла подстановку
то форма уравнений после подстановки не менялась! Уравнения (15.3) теперь называют преобразованием Лоренца. А Эйнштейн, следуя мысли, впервые высказанной Пуанкаре, предположил, что все физические законы не должны меняться от преобразований Лоренца. Иными словами, надо менять не законы электродинамики, а законы механики. Но как же изменять законы Ньютона, чтобы они при преобразованиях Лоренца не менялись? Когда такая цель поставлена, то остается только переписать уравнения Ньютона так, чтобы выполнялись поставленные условия. Как оказалось, единственное, что нужно от них потребовать,— это, чтоб масса m в уравнениях Ньютона приобрела вид (15.1). Стоит внести это изменение, и наступает полная гармония между уравнениями Ньютона и Максвелла. Если вы теперь, желая согласовать измерения, проведенные Миком и Джо, используете преобразования Лоренца, то вы ни за что не узнаете, кто из них движется, ибо форма всех уравнений в обеих системах координат будет одной и той же!
Интересно понять, что означает эта замена старых преобразований координат и времени на новые. Старые (галилеевы) кажутся очевидными, новые (лоренцевы) выглядят необычно. Как же это может быть, с логической и с экспериментальной точек зрения, что справедливы не старые преобразования, а новые? Чтобы разобраться в этом, мало изучить законы механики, надо (как это и сделал Эйнштейн) проанализировать и наши представления о пространстве и времени, иначе этих преобразований не поймешь. В течение некоторого времени мы будем изучать эти представления и следствия из них. Покамест же стоит отметить, что такой анализ оказывается вполне оправданным — его результаты согласуются с данными опыта.
§ 3. Опыт Майкелъсона— Морли
Мы уже говорили, что в свое время были сделаны попытки определить абсолютную скорость движения Земли сквозь воображаемый «эфир», который, как думали тогда, пропитывает собой все пространство. Самый известный из таких опытов проделали в 1887 г. Майкельсон и Морли. Но только через 18 лет отрицательные результаты их опыта объяснил Эйнштейн.

Фиг. 15.2. Схема опыта Майкельсона — Морли.
Для опыта Майкельсона — Морли использовался прибор, схема которого показана на фиг. 15.2. Главные части прибора: источник света А, посеребренная полупрозрачная стеклянная пластинка В, два зеркала С и Е. Все это жестко укрепляется на тяжелой плите. Зеркала С и Е размещены были на одинаковом расстоянии L от пластинки В. Пластинка В расщепляет падающий пучок света на два, перпендикулярных один к другому; они направляются на зеркала и отражаются обратно на пластинку В. Пройдя снова сквозь пластинку В, оба пучка накладываются друг на друга (D и F). Если время прохождения света от В до Е и обратно равно времени прохождения от В до С и обратно, то возникающие пучки D и F окажутся в фазе и усилятся взаимно; если же эти времена хоть немного отличаются, то в пучках возникает сдвиг по фазе и, как следствие,— интерференция. Если прибор в эфире «покоится», то времена в точности равны, а если он движется направо со скоростью и, то появится разница во времени. Давайте посмотрим, почему.
Сначала подсчитаем время прохождения света от В к Е и обратно. Пусть время «туда» равно t1? а время «обратно» равно t2. Но пока свет движется от В до зеркала, сам прибор уйдет на расстояние ut1, так что свету придется пройти путь L+-ut1 со скоростью с. Этот путь можно поэтому обозначить и как ct1; следовательно,


(этот результат становится очевидным, если учесть, что скорость света по отношению к прибору есть с — и; тогда как раз время равно длине L, деленной на с — и). Точно так же можно рассчитать и t2. За это время пластинка В приблизится на расстояние ut2, так что свету на обратном пути придется пройти только L-utz. Тогда
Общее же время равно


удобнее это записать в виде
А теперь подсчитаем, сколько времени t3 свет будет идти от пластинки В до зеркала С. Как и прежде, за время t3 зеркало С сдвинется направо на расстояние ut3 (до положения С'), а свет пройдет по гипотенузе ВС' расстояние ct3. Из

прямоугольного треугольника следует

или
откуда


При обратной прогулке от точки С' свету приходится пройти то же расстояние; это видно из симметрии рисунка. Значит, и время возвращения то же (t3), а общее время равно 2t3. Мы запишем его в виде
Теперь мы можем сравнить оба времени. Числители в (15.4) и (15.5) одинаковы — это время распространения света в покоящемся приборе. В знаменателях член u2/с2 мал, если только и много меньше c. Знаменатели эти показывают, насколько изменяется время из-за движения прибора. Заметьте, что эти изменения неодинаковы — время прохождения света до С и обратно чуть меньше времени прохождения до Е и обратно. Они не совпадают, даже если расстояния от зеркал до В одинаковы. Остается только точно измерить эту разницу.
Здесь возникает одна техническая тонкость: а что если длины L не точно равны между собой? Ведь точного равенства все равно никогда не добьешься. В этом случае надо просто повернуть прибор на 90°, расположив ВС по движению, a BE — поперек. Различие в длинах тогда перестает играть роль, и остается только наблюдать за сдвигом интерференционных полос при повороте прибора.
Во время опыта Майкельсон и Морли расположили прибор так, что отрезок BE оказался параллельным движению Земли по орбите (в определенный час дня и ночи). Орбитальная скорость равна примерно 30 км/сек, и «снос эфира» в определенные часы дня или ночи и в определенное время года должен достигать этой величины. Прибор был достаточно чувствителен, чтобы заметить такое явление. Но никакого различия во временах обнаружено не было — скорость движения Земли сквозь эфир оказалось невозможно обнаружить. Результат опыта был нулевой.
Это было загадочно. Это настораживало. Первую плодотворную идею, как выйти из тупика, выдвинул Лоренц. Он допустил, что все материальные тела при движении сжимаются, но только в направлении движения. Таким образом, если длина покоящегося тела есть L0, то длина тела, движущегося
со скоростью и (назовем ее L\\, где значок \\ показывает, что движение происходит вдоль длины тела), дается формулой
Lll=L0Ц(1-u2/c2). (15.6)

Если эту формулу применить к интерферометру Майкельсона — Морли, то расстояние от В до С останется прежним, а расстояние от В до E укоротится до LЦ(1-u2/с2). Таким образом, уравнение (15.5) не изменится, но L в уравнении (15.4) изменится в соответствии с (15.6). В результате мы получим
Сравнивая это с (15.5), мы видим, что теперь t1+t2=2t3. Стало быть, если прибор действительно сокращается так, как мы предположили, то становится понятным, почему опыт Майкельсона — Морли никакого эффекта не дал.
Хотя гипотеза сокращения успешно объясняла отрицательный итог опыта, она сама оказалась беззащитной перед обвинением, что ее единственная цель — избавиться от трудностей в объяснении опыта. Она была чересчур искусственной. Однако сходные трудности возникали и в других опытах по обнаружению эфирного ветра. В конце концов стало казаться, что природа вступила в «заговор» против человека, что она прибегла к конспирации и то и дело вводит какие-то новые явления, чтобы свести к нулю каждое явление, с помощью которого человек пытается измерить и.
И наконец, было признано (на это указал Пуанкаре), что полная конспирация — это и есть закон природы! Пуанкаре предположил, что в природе есть закон, заключающийся в том, что нельзя обнаружить эфирный ветер никаким способом, т. е. абсолютную скорость обнаружить невозможно.
§ 4. Преобразование времени
При проверке, согласуется ли идея о сокращении расстояний с фактами, обнаруженными в других опытах, оказывается, что все действительно согласуется, если только считать, что время тоже преобразуется и притом так, как это высказано в уравнении (15.3). По этой-то причине время t3, которое затратит свет на путешествие от В к С и обратно, оказывается неодинаковым, если его вычисляет человек, делающий этот опыт в движущемся межпланетном корабле, или же неподвижный наблюдатель, который следит со стороны за этим кораблем. Для первого время t3 равно просто 2L/c, а для второго оно равно 2L/cЦ(1-u2/с2) [уравнение (15.5)]. Иными словами, если вы со стороны наблюдаете, как космонавт закуривает папиросу, вам кажется, что он делает это медленнее, нежели обычно, хотя сам он считает, что все происходит в нормальном темпе. Стало быть, не только длины должны сокращаться, но и приборы для измерения времени («часы») должны замедлить свой ход. Иначе говоря, когда часы на космическом корабле отсчитывают, по мнению космонавта, 1 сек, то, по мнению стороннего
! наблюдателя, пройдет 1/Ц(1-u2/с2) сек.
Замедление хода часов в движущейся системе — явление весьма своеобразное, и его стоит пояснить. Чтобы понять его, давайте проследим, что бывает с часовым механизмом, когда часы движутся. Так как это довольно сложно, то лучше часы выбрать попроще. Пусть это будет стержень (метровой длины) с зеркалами на обоих концах. Если пустить световой сигнал между зеркалами, то он будет без конца бегать туда-сюда, а часы будут тикать каждый раз, как только свет достигнет нижнего конца. Конструкция довольно глупая, но в принципе такие часы возможны. И вот мы изготовим двое таких часов со стержнями равной длины и синхронизуем их ход, пустив их одновременно; ясно, что они всегда будут идти одинаково: ведь длина стержней одна и та же, а скорость света с — тоже. Дадим одни часы космонавту; пусть он возьмет их с собой на межпланетный корабль и поставит их поперек направления движения, тогда длина стержня не изменится. Да, но откуда ' мы знаем, что поперечная длина не меняется? Наблюдатель может договориться с космонавтом, что на высоте у в тот момент, когда стержни поравняются, каждый сделает другому на его стержне метку. Из симметрии следует, что отметки придутся на те же самые координаты у и y', в противном случае одна метка окажется ниже или выше другой и, сравнив их,
можно будет сказать, кто из них двигался на самом деле. Так что же происходит в движущихся часах? Входя на борт корабля, космонавт убедился, что это вполне приличные стандартные часы и ничего особенного в их поведении на корабле он не заметил. Если бы он что-то заметил, то сразу понял бы, что он движется; если хоть что-то меняется в результате движения, то ясно, что он движется. Принцип же относительности утверждает, что в равномерно движущейся системе это невозможно; стало быть, в часах никаких изменений не произошло. С другой стороны, когда внешний наблюдатель взглянет на пролетающие мимо часы, он увидит, что свет, перебегая от зеркала к зеркалу, на самом деле движется зигзагами, потому что стержень все время перемещается боком. Мы уже анализировали такое зигзагообразное движение в связи с опытом Майкельсона — Морли. Когда за заданное время стержень сдвинется на расстояние, пропорциональное u (фиг. 15.3), то расстояние, пройденное за то же время светом, будет пропорционально с, и поэтому расстояние по вертикали пропорционально Ц(с2-и2).

Фиг. 15.3. Опыт со «световыми часами».
а, — «световые часы» покоятся в системе S '; б—те же часы движутся через систему S; в — диагональ, по которой движется пучок света в движущихся «световых часах».
Значит, свету понадобится больше времени, чтобы пройти движущийся стержень из конца в конец,— больше, чем когда стержень неподвижен. Поэтому кажущийся промежуток времени между тиканьями движущихся часов удлинится в той же пропорции, во сколько гипотенуза треугольника длиннее катета (из-за этого в формуле и появляется корень). Из рисунка также видно, что чем и больше, тем сильнее видимое замедление хода часов. И не только такие часы начнут отставать, но (если только теория относительности правильна!) любые часы, основанные на любом принципе, также должны отстать, причем в том же отношении. За это можно поручиться, не проделывая дальнейшего анализа. Почему?
Чтобы ответить и на этот вопрос, положим, что у нас есть еще двое часов, целиком сходных между собой, скажем, с зубчатками и камнями, или основанных на радиоактивном распаде, или еще каких-нибудь. Опять согласуем их ход с нашими первыми часами. Пусть, пока свет прогуляется до конца и обратно, известив о своем прибытии тиканьем, за это время новая модель завершит свой цикл и тоже возвестит об этом какой-нибудь вспышкой, звонком или любым иным сигналом. Захватим с собой на космический корабль новую модель часов. Может быть, эти часы уже не отстанут, а будут идти так же, как их неподвижный двойник. Ах, нет! Если они разойдутся с первой моделью (которая тоже находится на корабле), то человек сможет использовать этот разнобой между показаниями обоих часов, чтобы определить скорость корабля. А ведь считается, что скорость узнать немыслимо. Смотрите, как ловко! Нам не нужно ничего знать о механизме работы новых часов, не нужно знать, что именно в них замедляется, мы просто знаем, что, какова бы ни была причина, ход часов будет выглядеть замедленным, и притом в любых часах одинаково.
Что же выходит? Если все движущиеся часы замедляют свой ход, если любой способ измерения времени приводит к замедленному темпу течения времени, нам остается только сказать, что само время, в определенном смысле, кажется на движущемся корабле замедленным. На корабле все: и пульс космонавта, и быстрота его соображения, и время, потребное для зажигания папиросы, и период возмужания и постарения — все это должно замедлиться в одинаковой степени, ибо иначе можно будет узнать, что корабль движется. Биологи и медики иногда говорят, что у них нет уверенности в том, что раковая опухоль будет в космическом корабле развиваться дольше.
Однако с точки зрения современного физика это случится почти наверняка; в противном случае можно было бы по быстроте развития опухоли судить о скорости корабля!
Очень интересным примером замедления времени при движении снабжают нас мю-мезоны (мюоны) — частицы, которые в среднем через 2,2·10-6 сек самопроизвольно распадаются. Они приходят на Землю с космическими лучами, но могут быть созданы и искусственно в лаборатории. Часть космических мюонов распадается еще на большой высоте, а остальные — только после того, как остановятся в веществе. Ясно, что при таком кратком времени жизни мюон не может пройти больше 600 м, даже если он будет двигаться со скоростью света. Но хотя мюоны возникают на верхних границах атмосферы, примерно на высоте 10 км и выше, их все-таки обнаруживают в земных лабораториях среди космических лучей. Как это может быть? Ответ состоит в том, что разные мюоны летят с различными скоростями, иногда довольно близкими к скорости света. С их собственной точки зрения они живут всего лишь около 2 мксек, с нашей же — их жизненный путь несравненно более долог, достаточно долог, чтобы достигнуть поверхности Земли. Их жизнь удлиняется в 1/Ц(1-u2/c2) раз. Среднее время жизни мюонов разных скоростей было точно измерено, причем полученное значение хорошо согласуется с формулой.
Мы не знаем, почему мезон распадается и каков его внутренний механизм, но зато мы знаем, что его поведение удовлетворяет принципу относительности. Тем и полезен этот принцип — он позволяет делать предсказания даже о тех вещах, о которых другим путем мы мало чего узнаем. К примеру, еще не имея никакого представления о причинах распада мезона, мы все же можем предсказать, что если его скорость составит 9/10 скорости света, то кажущаяся продолжительность отведенного ему срока жизни будет равна 2,2 · 10-6/Ц(1-92/102) сек. И это предсказание оправдывается. Правда, неплохо?
§ 5. Лоренцево сокращение
Теперь мы вернемся к преобразованию Лоренца (15.3) и попытаемся лучше понять связь между системами координат (х, у, z, t) и (х', у', z', t'). Будем называть их системами S и S', или соответственно системами Джо и Мика. Мы уже отметили, что первое уравнение основывается на предположении Лоренца о том, что по направлению х все тела сжимаются. Как же можно доказать, что такое сокращение действительно бывает? Мы уже понимаем, что в опыте Майкельсона — Морли по принципу относительности поперечное плечо ВС не может сократиться; в то же время нулевой результат опыта требует,
чтобы времена были равны. Чтобы получился такой результат, приходится допустить, что продольное плечо BE кажется сжатым в отношении Ц(1-и2/с2). Что означает это сокращение на языке Джо и Мика? Положим, что Мик, двигаясь с системой S' в направлении х', измеряет метровой линейкой координату х' в некоторой точке. Он прикладывает линейку х' раз и думает, что расстояние равно х' метрам. С точки же зрения Джо, (в системе S) линейка у Мика в руках укорочена, а «на самом деле» отмеренное им расстояние равно x'Ц(1-u2/с2) метров. Поэтому если система S' удалилась от системы S на расстояние ut, то наблюдатель в системе S должен сказать, что эта точка (в его координатах) удалена от начала на x=x'Ц(1-u2/c2)+ut, или

Это и есть первое уравнение из преобразований Лоренца.
§ 6. Одновременность

Подобным же образом из-за различия в масштабах времени появляется и знаменатель в уравнении (15.Зг) в преобразованиях Лоренца. Самое интересное в этом уравнении — это новый и неожиданный член в числителе, член ux/с2. В чем его смысл? Внимательно вдумавшись в положение вещей, можно понять, что события, происходящие, по мнению Мика (наблюдателя в системе S'), в разных местах одновременно, с точки зрения Джо (в системе S), вовсе не одновременны. Когда одно событие случилось в точке x1 в момент t0, а другое — в точке х2 в тот же момент t0, то соответствующие моменты t1 и t2 отличаются на
Это явление можно назвать «нарушением одновременности удаленных событий». Чтобы пояснить его, рассмотрим следующий опыт.
Пусть человек, движущийся в космическом корабле (система S'), установил в двух концах корабля часы. Он хочет знать, одинаково ли они идут. Как синхронизовать ход часов? Это можно сделать по-разному. Вот один из способов, он почти не требует вычислений. Расположимся как раз где-то посредине между часами. Из этой точки пошлем в обе стороны световые сигналы. Они будут двигаться в обоих направлениях с одинаковой скоростью и достигнут обоих часов в одно и то же время. Вот этот-то одновременный приход сигналов и можно применить для согласования хода. Положим, что человек в S' таким способом согласует ход часов. Посмотрим, согласится ли наблюдатель в системе S, что эти часы идут одинаково. Космонавт в системе S' имеет право верить, что их ход одинаков; ведь он не знает, что он движется. Но наблюдатель в системе S сразу рассудит, что раз корабль движется, то часы на носу корабля удалились от светового сигнала и свету пришлось пройти больше половины длины корабля, прежде чем он достиг часов; часы на корме, наоборот, двигались к световому сигналу — значит, его путь сократился. Поэтому сигнал сперва дошел до часов на корме, хотя космонавту в системе S' показалось, что сигналы достигли обоих часов одновременно. Итак, выходит, что когда космонавт считает, что события в двух местах корабля произошли одновременно (при одном и том же значении t' в его системе координат), то в другой системе координат одинаковым t' отвечают разные значения t!
§ 7. Четырехвекторы
Что еще можно обнаружить в преобразованиях Лоренца? Любопытно, что в них преобразование х и t по форме похоже на преобразование хну, изученное нами в гл. 11, когда мы говорили о вращении координат. Тогда мы получили


т. е. новое х' перемешивает старые х и y, а у' тоже их перемешивает. Подобным же образом в преобразовании Лоренца новое х' есть смесь старых х и t, а новое t' — смесь t и х. Значит, преобразование Лоренца похоже на вращение, но «вращение» в пространстве и времени. Это весьма странное понятие. Проверить аналогию с вращением можно, вычислив величину
В этом уравнении три первых члена в каждой стороне представляют собой в трехмерной геометрии квадрат расстояния между точкой и началом координат (сферу). Он не меняется (остается инвариантным), несмотря на вращение осей координат. Аналогично, уравнение (15.9) свидетельствует о том, что существует определенная комбинация координат и времени, которая остается инвариантной при преобразовании Лоренца, Значит, имеется полная аналогия с вращением; аналогия эта такого рода, что векторы, т. е. величины, составленные из «компонент», преобразуемых так же, как и координаты, оказываются полезными и в теории относительности.
Итак, мы расширим понятие вектора. Пока он у нас мог иметь только пространственные компоненты. Теперь включим в это понятие и временную компоненту, т. е. мы ожидаем, что существуют векторы с четырьмя компонентами: три из них похожи на компоненты обычного вектора, а к ним привязана четвертая — аналог времени.
В следующих главах мы проанализируем это понятие. Мы увидим, что если идеи этого параграфа приложить к импульсу, то преобразование даст три пространственные составляющие, подобные обычным компонентам импульса, и четвертую компоненту — временную часть (которая есть не что иное, как энергия).
§ 8. Релятивистская динамика
Теперь мы готовы к тому, чтобы с более общей точки зрения исследовать, как преобразования Лоренца изменяют законы механики. [До сих пор мы только объясняли, как изменяются длины и времена, но не объяснили, как получить измененную формулу для т, уравнение (15.1). Это будет сделано в следующей главе.] Изучение следствий формулы Эйнштейна для массы m в механике Ньютона мы начнем с закона силы. Сила есть быстрота изменения импульса, т. е.
F=d(mv)/dt

Импульс по-прежнему равен mv, но теперь
Это законы Ньютона в записи Эйнштейна. При этом видоизменении, если действие и противодействие по-прежнему равны (может, не в каждый момент, но по крайней мере после усреднения по времени), то, как и раньше, импульс должен сохраняться, но сохраняющейся величиной является не старое mv при постоянном m, а выражение (15.10) с переменной массой. С таким изменением в формуле для импульса сохранение импульса по-прежнему будет существовать.
Посмотрим теперь, как импульс зависит от скорости. В ньютоновой механике он ей пропорционален. В релятивистской механике в большом интервале скоростей (много меньших с) они также примерно пропорциональны [см. (15.10)], потому что корень мало отличается от единицы. Но когда v почти равно с, то корень почти равен нулю и импульс поэтому беспредельно растет.
Что бывает, когда на тело долгое время воздействует постоянная сила? В механике Ньютона скорость тела беспрерывно будет возрастать и может превысить даже скорость света. В релятивистской же механике это невозможно. В теории относительности беспрерывно растет не скорость тела, а его импульс, и рост этот сказывается не на скорости, а на массе тела. Со временем ускорение, т. е. изменения в скорости, практически исчезает, но импульс продолжает расти. Поскольку сила приводит к очень малым изменениям в скорости тела, мы, естественно, считаем, что у тела громадная инерция. Но как раз это самое и утверждает релятивистская формула (15.10) для массы тела; она говорит, что инерция крайне велика, когда v почти равно с. Разберем пример. Чтобы отклонить быстрые электроны в синхротроне Калифорнийского Технологического института, необходимо магнитное поле, в 2000 раз более сильное, чем следует из законов Ньютона. Иными словами, масса электронов в синхротроне в 2000 раз больше их нормальной массы, достигая массы протона! Если m в 2000 раз больше m0, то 1-v2/с2 равно 1/4 000 000, или v отличается от с на 1/8 000 000, т.е. скорость электронов вплотную подходит к скорости света. Если электроны и свет одновременно отправятся в соседнюю лабораторию (находящуюся, скажем, в 200 м), то кто явится первым? Ясное дело, свет: он всегда движется быстрее. Но насколько быстрее? Трудно сказать, насколько раньше во времени, но зато можно сказать, на какое расстояние отстанут электроны: на 1/30 мм, т. е. на 1/3 толщины этого листка бумаги! Масса электронов в этих состязаниях чудовищна, а скорость не выше скорости света.
На чем еще скажется релятивистский рост массы? Рассмотрим движение молекул газа в баллоне. Если газ нагреть, скорость молекул возрастет, а вместе с нею и их масса. Газ станет тяжелее. Насколько?

Разлагая т0/Ц(1-v2/c2)=m0(1-v2/с2)-1/2 в ряд по формуле бинома Ньютона, можно найти приближенно рост массы при малых скоростях. Получается

Из формулы ясно, что при малых v ряд быстро сходится и первых двух-трех членов здесь вполне достаточно. Значит, можно написать
где второй член и выражает рост массы за счет повышения скорости. Когда растет температура, v2 растет в равной мере, значит, увеличение массы пропорционально повышению температуры. Но 1/2т0v2 — это кинетическая энергия в старомодном, ньютоновом смысле этого слова. Значит, можно сказать, что прирост массы газа равен приросту кинетической энергии, деленной на с2, т. е. Dm=D(к.э.)/с2.
§ 9. Связь массы и энергии
Это наблюдение навело Эйнштейна на мысль, что массу тела можно выразить проще, чем по формуле (15.1), если сказать, что масса равна полному содержанию энергии в теле, деленному на с2. Если (15.11) помножить на с2, получается
mc2=m0с2+1/2m0v2+... . (15.12)
Здесь левая часть дает полную энергию тела, а в последнем члене справа мы узнаем обычную кинетическую энергию. Эйнштейн осмыслил первый член справа (очень большое постоянное число т0с2) как часть полной энергии тела, а именно как его внутреннюю энергию, или «энергию покоя».
К каким следствиям мы придем, если вслед за Эйнштейном предположим, что энергия тела всегда равна тс2? Тогда мы сможем вывести формулу (15.1) зависимости массы от скорости, ту самую, которую до сих пор мы принимали на веру. Пусть тело сперва покоится, обладая энергией т0с2. Затем мы прикладываем к телу силу, которая сдвигает его с места и поставляет ему кинетическую энергию; раз энергия примется возрастать, то начнет расти и масса (это все заложено в первоначальном предположении). Пока сила действует, энергия и масса продолжают расти. Мы уже видели (см. гл. 13), что быстрота роста энергии со временем равна произведению силы на скорость
de/dt=F·v. (15.13)

Кроме того, F=d(mv)/dt [см. гл. 9, уравнение (9.1)]. Связав все это с определением Е и подставив в (15.13), получим

Мы хотим решить это уравнение относительно m. Для этого помножим обе части на 2m. Уравнение обратится в

Теперь нам нужно избавиться от производных, т. е. проинтегрировать обе части равенства. В величине (2m) dm/dt можно узнать производную по времени от m2, а в (2mv)·d(mv)/dt— производную по времени от (mv)2. Значит, (15.15) совпадает с
Когда производные двух величин равны, то сами величины могут отличаться не больше чем на константу С. Это позволяет написать
m2с2=m2v2+C. (15.17)
Определим теперь константу С явно. Так как уравнение (15.17) должно выполняться при любых скоростях, то можно взять v=0 и обозначить в этом случае массу через m0. Подстановка этих чисел в (15.17) дает
m20c2=0+С.
Это значение С теперь можно подставить в уравнение (15.17). Оно принимает вид
m2c2=m2v2+m20c2. (15.18)
Разделим на с2 и перенесем члены с m в левую часть
m2(1-v2/c2)=m20,
откуда

А это и есть формула (15.1), т. е. как раз то, что необходимо, чтобы в уравнении (15.12) было соответствие между массой и энергией.
В обычных условиях изменения в энергии приводят к очень малым изменениям в массе: почти никогда не удается из данного количества вещества извлечь много энергии; но в атомной бомбе с энергией взрыва, эквивалентной 20 000 тонн тринитротолуола, весь пепел, осевший после взрыва, на 1 г легче первоначального количества расщепляющегося материала. Это потому, что выделилась энергия, которая имела массу 1 г, в согласии с формулой DE=D(mc2). Вывод об эквивалентности массы и энергии прекрасно подтвердился в опытах по аннигиляции материи — превращению вещества в энергию. Электрон с позитроном могут взаимодействовать в покое, имея каждый массу покоя m0. При сближении они исчезают, а вместо них излучаются два g-луча, каждый опять с энергией т0с2. Этот опыт прямо сообщает нам о величине энергии, связанной с существованием массы покоя у частицы.
* Правда, видимый свет проиграет гонку из-за преломления в воздухе. А g-излучение ее, несомненно, выиграет.
* Выпуск 1
Глава 16
РЕЛЯТИВИСТСКАЯ ЭНЕРГИЯ И РЕЛЯТИВИСТСКИЙ ИМПУЛЬС
§ 1. Относительность и «философы»
§ 2. Парадокс близнецов
§ 3. Преобразование скоростей
§ 4. Релятивистская масса
§ 5. Релятивистская энергия
§ 1. Относительность и «философы»
В этой главе мы продолжим обсуждение принципа относительности Эйнштейна — Пуанкаре, его влияния на наши физические воззрения и на весь характер человеческого мышления.
Пуанкаре следующим образом сформулировал принцип относительности: «Согласно принципу относительности, законы физических явлений обязаны быть одинаковыми для неподвижного наблюдателя и для наблюдателя, который относительно него переносится равномерным движением, так что у нас нет и не может быть никаких способов отличить, уносит ли нас такое движение или не уносит».
Когда эта мысль обрушилась на человечество, среди философов началась суматоха. Особенно среди «философов за чашкой чая», которые говорят: «О, это очень просто: теория Эйнштейна утверждает, что все относительно!» Поразительное множество таких «философов»— и не только рассуждающих за чашкой чая (впрочем, не желая их обижать, я буду говорить только о «философах за чашкой чая»)—твердят: «Из открытий Эйнштейна следует, что все относительно; это оказало глубокое влияние на нашу мысль». И еще потом добавляют: «В физике было доказано, что явления зависят от системы отсчета». Можно услышать немало подобных вещей, но трудно понять их смысл. По-видимому, системы отсчета, о которых идет речь, — это те системы координат, которыми мы пользовались в анализе теории относительности. Итак, тот факт, что «все зависит от системы отсчета», оказывает могучее влияние на современную мысль. Остается только удивляться, почему? Ведь прежде всего сама идея: «все зависит от точки зрения» — настолько проста, что, несомненно, не было нужды обременять себя анализом трудностей физической теории относительности, чтобы открыть ее. Всякий, кто идет по тротуару, знает, что все, что он видит, зависит от его системы отсчета. Сперва он видит лица прохожих, а уж потом — их затылки. И почти во всех философских заключениях, о которых говорят, что они проистекли из теории относительности, нет ничего более глубокого, чем утверждения типа: «Пешеход выглядит спереди иначе, нежели сзади». Известный рассказ о нескольких слепых, споривших, на что похож слон, тоже весьма напоминает теорию относительности с точки зрения таких философов.
Но в теории относительности, пожалуй, есть кое-что и поглубже, чем наблюдение, что человек спереди выглядит иначе, чем сзади. Принцип относительности куда глубже этого, ведь с его помощью мы можем делать определенные предсказания. Но было бы более чем странно, если бы только это наблюдение позволило нам предсказывать поведение природы.
Есть и другая школа «философов». Эти чувствуют себя очень неуютно из-за теории относительности, которая заявляет, что нельзя определить свою абсолютную скорость, не глядя ни на что снаружи корабля. Они восклицают: «Вполне понятно, что никто не может измерить своей скорости, не выглядывая наружу. Само собой очевидно, что бессмысленно говорить о чьей-то скорости, если не глядеть по сторонам. Глупцы были те физики, которые думали иначе. Их вдруг осенило, вот они и рады; но если бы мы, философы, представляли, какие проблемы стояли перед физиками, мы их давно решили бы чисто мозговым усилием и сразу же поняли бы, что невозможно определить скорость, не выглянув наружу. И мы сделали бы громадный вклад в эту их физику». Эти философы всегда топчутся около нас, они мельтешат на обочинах науки, то и дело порываясь сообщить нам что-то. Но никогда на самом деле они не понимали всей тонкости и глубины наших проблем.
Наша неспособность засечь абсолютное движение — это результат опытов, а не итог плоского философствования. Это легко пояснить. Начать с того, что еще Ньютон считал, что действительно невозможно узнать свою скорость, если движешься прямолинейно и равномерно. Ведь первым-то провозгласил принцип относительности именно Ньютон (мы цитировали его слова в предыдущей главе). Почему же в те, ньютоновы времена философы не поднимали такого шума о том, что «все относительно» и так далее и тому подобное? А потому, что пока Максвелл не развил свою электродинамику, существовали физические законы, позволявшие утверждать, что можно измерить свою скорость, даже и не выглянув наружу; но вскоре после Максвелла экспериментально было установлено, что это невозможно.
А теперь скажите, действительно ли так уж абсолютно и определенно необходимо с философской точки зрения, чтобы невозможно было знать свою скорость, не посмотрев по сторонам? Одним из следствий теории относительности явилось развитие философии, которая утверждала: «Определять можно только то, что поддается измерению! Так как ясно, что нельзя измерить скорость, не видя, по отношению к чему она измеряется, то естественно, что понятие абсолютной скорости смысла не имеет. Физики обязаны понять, что можно говорить только о том, что поддается измерению». Но в этом-то и весь вопрос: сказать, можем ли мы определить абсолютную скорость,— это все равно, что решить, можно или нельзя выяснить из эксперимента, движется ли корабль, не выглядывая в иллюминатор. Иными словами, нельзя априори утверждать, что что-то измеримо, а что-то нет; это решает не рассуждение, а эксперимент. Немного найдется философов, которые хладнокровно объявят очевидным, что если скорость света внутри автомобиля равна 300 000 км/сек, а скорость самого автомобиля достигает 100 000 км/сек, то свет проносится мимо наблюдателя на дороге тоже со скоростью 300 000 км/сек. Для них это потрясающий факт; даже те из них, для кого относительность разумеется сама собой, обнаруживают, когда вы предъявляете им конкретный факт, что это совсем не так уж очевидно.
И наконец, есть даже «философы», утверждающие, что вообще мы не в состоянии обнаруживать никакого движения, не выглядывая наружу. А уж это просто неверно. Действительно, нельзя заметить равномерного движения по прямой линии, но если бы вся комната вертелась, мы бы определенно об этом знали, потому что все в ней разлеталось бы к стенкам — наблюдались бы всяческого рода «центробежные» эффекты. Тот факт, что Земля наша вращается вокруг своей оси, можно обнаружить, не глядя на звезды, скажем, с помощью так называемого маятника Фуко. Стало быть, неверно, что «все относительно»; нельзя обнаружить только равномерное движение, не выглядывая наружу. Равномерное вращение вокруг фиксированной оси обнаружить можно. А когда вы это скажете философу, он очень огорчится, что прежде этого не понимал; ему, видите ли, казалось, что просто невозможно установить вращение вокруг оси, не наблюдая внешний мир. Правда, если он достаточно сообразителен, то через некоторое время он может вернуться и заявить: «Понял! На самом деле никакого абсолютного вращения не существует. Видите ли,— скажет он,— на самом деле мы вращаемся относительно звезд. И вследствие какого-то невыясненного влияния, оказываемого на тела звездами, возникает центробежная сила».
Ну что ж! Судя по всему, это верно; в настоящее время у нас нет способа узнать, существовала бы центробежная сила, если бы не было звезд и туманностей. Не в наших силах сделать такой эксперимент — убрать все туманности, а затем измерить наше вращение; значит, тут мы ничего сказать не можем. Мы должны допустить, что философ может оказаться прав. Он тогда расцветает от удовольствия и изрекает: «И вообще совершенно необходимо, чтобы все в мире в конечном счете подчинялось тому же принципу: абсолютное вращение — это бессмысленно, можно говорить только о вращении по отношению к туманностям». И тут-то мы ему ответим: «А тогда скажи, друг мой, само собой или не само собой разумеется, что равномерное движение по прямой линии относительно туманностей не должно никак чувствоваться внутри автомобиля?» И теперь, когда движение уже больше не абсолютное, когда оно стало движением относительно туманностей, вопрос оказывается темным и на него можно ответить, лишь поставив эксперимент.
Но в чем же в таком случае выразились философские влияния теории относительности? Какие новые идеи и предложения внушил физикам принцип относительности? Если ограничиться только этого рода влияниями, то их можно описать следующим образом. Первое открытие, по существу, состояло в том, что даже те идеи, которые уже очень долго держатся и очень точно проверены, могут быть ошибочными. Каким это было большим потрясением — открыть, что законы Ньютона неверны, и это после того, как все годы они казались точными! Теперь, конечно, ясно, что не опыты были неправильными, а просто все они проделывались в слишком ограниченном интервале скоростей — таком узком, что релятивистские эффекты невозможно было заметить. И все же теперь мы взираем на наши законы физики куда более смиренно — ведь любой из них может оказаться ошибочным!
Во-вторых, если возникают некие «странные» идеи, вроде того, что когда идешь, то время тянется медленнее и т. д., то неуместен вопрос: нравится ли это нам? Единственно уместен здесь другой вопрос: согласуются ли эти идеи с тем, что показал опыт? Иначе говоря, «странные идеи» должны быть согласны только с экспериментом. Единственный резон, почему мы должны обсуждать поведение часов и т. п., состоит в следующем: мы должны доказать, что, хотя определение растяжения времени и очень странно, с нашим способом измерять время оно вполне согласуется.
И наконец, теория относительности подсказала нам еще кое-что; может быть, это был чисто технический совет, но он оказался чрезвычайно полезным при изучении других физических законов. Совет состоял в том, что надо обращать внимание на симметрию законов, или, более определенно, искать способы, с помощью которых законы можно преобразовать, сохраняя при этом их форму. Когда мы обсуждали теорию векторов, мы отмечали, что основные законы движения не меняются, когда мы особым образом изменяем пространственные и временные переменные (пользуемся преобразованием Лоренца). Идея изучать операции, при которых основные законы не меняются, оказалась и впрямь очень полезной.
§ 2. Парадокс близнецов
Чтобы продолжить наше изучение преобразований Лоренца и релятивистских эффектов, рассмотрим известный «парадокс» — парадокс близнецов, скажем, Петера и Пауля. Подросши, Пауль улетает на космическом корабле с очень высокой скоростью. Петер остается на Земле. Он видит, что Пауль уносится с огромной скоростью, и ему кажется, что часы Пауля замедляют свой ход, сердце Пауля бьется реже, мысли текут ленивее. С точки зрения Петера, все замирает. Сам же Пауль, конечно, ничего этого не замечает. Но когда после долгих странствий он возвратится на Землю, он окажется моложе Петера! Верно ли это? Да, это одно из тех следствий теории относительности, которые легко продемонстрировать. Мю-мезоны живут дольше, если они движутся; так и Пауль проживет дольше, если будет двигаться. «Парадоксом» это явление называют лишь те, кто считает, что принцип относительности утверждает относительность всякого движения. Они восклицают: «Хе-хе-хе! А не можем ли мы сказать, что с точки зрения Пауля двигался Петер и что именно Петер должен был медленнее стареть? Из симметрии тогда следует единственный возможный вывод: при встрече возраст обоих братьев должен оказаться одинаковым».
Но ведь чтобы встретиться и помериться годами, Пауль должен либо остановиться в конце путешествия и сравнить часы, либо, еще проще, вернуться. А возвратиться может только тот, кто двигался. И он знает о том, что двигался, потому что ему пришлось повернуть, а при повороте на корабле произошло много необычных вещей: заработали ракеты, предметы скатились к одной стенке и т. д. А Петер ничего этого не испытал.
Поэтому можно высказать такое правило: тот, кто почувствовал ускорение, кто увидел, как вещи скатывались к стенке, и т. д.,— тот и окажется моложе. Разница между братьями имеет «абсолютный» смысл, и все это вполне правильно. Когда мы обсуждали долгую жизнь движущегося мю-мезона, в качестве примера мы пользовались его прямолинейным движением сквозь атмосферу. Но можно породить мю-мезоны и в лаборатории и заставить с помощью магнита их двигаться по кругу. И даже при таком ускоренном движении они проживут дольше, причем столько же, сколько и при прямолинейном движении с этой скоростью. Можно было бы попытаться разрешить парадокс опытным путем: сравнить покоящийся мю-мезон с закрученным по кругу. Несомненно, окажется, что закрученный мю-мезон проживет дольше. Такого опыта еще никто не ставил, но он и не нужен, потому что и так все прекрасно согласуется. Конечно, те, кто настаивает на том, что каждый отдельный факт должен быть непосредственно проверен, этим не удовлетворятся. А мы все же уверенно беремся предсказать результат опыта, в котором Пауль кружится по замкнутому кругу.
§ 3. Преобразование скоростей
Главное отличие принципа относительности Эйнштейна от принципа относительности Ньютона заключается в том, что законы преобразований, связывающих координаты и времена в системах, движущихся относительно друг друга, различны.
Правильный закон преобразований (Лоренца) таков:

Эти уравнения отвечают сравнительно простому случаю, когда наблюдатели движутся относительно друг друга вдоль общей оси х. Конечно, мыслимы и другие направления движения, но самое общее преобразование Лоренца выглядит довольно сложно: в нем перемешаны все четыре числа. Мы и впредь будем пользоваться этой простой формулой, так как она содержит в себе все существенные черты теории относительности.
Рассмотрим теперь дальнейшие следствия этого преобразования. Прежде всего интересно разрешить эти уравнения относительно х, у, z, t. Это система четырех линейных уравнений для четырех неизвестных, и их можно решить — выразить х, у, z, t через х', у', z', t'. Результат этот потому интересен, что он говорит нам, как «покоящаяся» система координат выглядит с точки зрения «движущейся». Ясно, что из-за относительности движения и постоянства скорости тот, кто «движется», может, если пожелает, счесть себя неподвижным, другого — движущимся. А поскольку он движется в обратную сторону, то получит то же преобразование, но с противоположным знаком у скорости. Это в точности то, что дает и прямое решение системы, так что все сходится. Вот если бы не сошлось, было бы от чего встревожиться!

Теперь займемся интересным вопросом о сложении скоростей в теории относительности. Напомним, что первоначально загадка состояла в том, что свет проходит 300 000 км/сек во всех системах, даже если они движутся друг относительно друга. Это — частный случай более общей задачи. Приведем пример. Пусть предмет внутри космического корабля движется вперед со скоростью 200 000 км/сек; скорость самого корабля тоже 200 000 км/сек. С какой скоростью перемещается предмет с точки зрения внешнего наблюдателя? Хочется сказать: 400 000 км/сек, но эта цифра уж больно подозрительна: получается скорость большая, чем скорость света! Разве можно себе это представить?
Общая постановка задачи такова. Пусть скорость тела внутри корабля равна v (с точки зрения наблюдателя на корабле), а сам корабль имеет скорость и по отношению к Земле. Мы желаем знать, с какой скоростью vx это тело движется с точки зрения земного наблюдателя. Впрочем, это тоже не самый общий случай, потому что движение происходит в направлении х. Могут быть формулы для преобразования скоростей в направлении у или в любом другом; если они будут нужны, их всегда можно вывести. Внутри корабля скорость тела равна vx' . Это значит, что перемещение х' равно скорости, умноженной на время:
x'=vx·'t'. (16.3)

Остается только подсчитать, какие у тела значения х и t с точки зрения внешнего наблюдателя, если х' и t' связаны соотношением (16.3). Подставим (16.3) в (16.2) и получим

Но здесь х выражено через t'. А скорость с точки зрения внешнего наблюдателя — это «его» расстояние, деленное на «его» время, а не на время другого наблюдателя! Значит, надо и время подсчитать с его позиций

А теперь разделим х на t. Квадратные корни сократятся, останется же
Это и есть искомый закон: суммарная скорость не равна сумме скоростей (это привело бы ко всяким несообразностям), но «подправлена» знаменателем 1+uv/c2.
Что же теперь будет получаться? Пусть ваша скорость внутри корабля равна половине скорости света, а скорость корабля тоже равна половине скорости света. Значит, и u равно 1/2с, и v равно 1/2c, но в знаменателе uv равно 1/4, так что
Выходит по теории относительности, что 1/2 и 1/2 дают не 1, a 4/5. Небольшие скорости, конечно, можно складывать, как обычно, потому что, пока скорости по сравнению со скоростью света малы, о знаменателе (1 +uv/с2) можно забыть, но на больших скоростях положение меняется.

Возьмем предельный случай. Положим, что человек на борту корабля наблюдает, как распространяется свет. Тогда v=c. Что обнаружит земной наблюдатель? Ответ будет такой:
Значит, если что-то движется со скоростью света внутри корабля, то, с точки зрения стороннего наблюдателя, скорость не изменится, она по-прежнему будет равна скорости света! Это именно то, ради чего в первую очередь предназначал Эйнштейн свою теорию относительности.
Конечно, бывает, что движение тела не совпадает по направлению с равномерным движением корабля. Например, тело движется «вверх» со скоростью vy' по отношению к кораблю, а корабль движется «горизонтально». Проделывая такие же манипуляции (только х надо заменить на у), получаем

y=y'=vy't', так что при vx'=0
Итак, боковая скорость тела уже не vy' , a vy'Ц(1-u2/с2). Этот результат мы получили, пользуясь формулами преобразований. Но он вытекает и прямо из принципа относительности по следующей причине (всегда бывает полезно докопаться до первоначальной причины). Мы уже раньше рассуждали (см. фиг. 15.3) о том, как могут работать движущиеся часы; свет кажется распространяющимся наискось со скоростью с в неподвижной системе, в то время как в движущейся системе он просто движется вертикально с той же скоростью. Мы нашли, что вертикальная, компонента скорости в неподвижной системе меньше скорости света на множитель Ц(1-u2/с2) [см. уравнение (15.3)]. Пусть теперь материальная частица движется в тех же «часах» взад-вперед со скоростью, равной 1/n скорости света (фиг. 16.1).

Фиг. 16.1. Траектории светового луча и частицы внутри движущихся часов.
Пока частица пройдет туда и обратно, свет пройдет этот путь ровно n раз (n — целое число). Значит, каждое тиканье «часов с частицей» совпадет с n-м тиканьем «световых часов». Этот факт должен остаться верным и тогда, когда тело движется, потому что физическое явление совпадения остается совпадением в любой системе. Ну а поскольку скорость су меньше скорости света, то скорость vy частицы должна быть меньше соответствующей скорости в том же отношении (с квадратным корнем)! Вот почему в любой вертикальной скорости появляется корень.
§ 4. Релятивистская масса
Из предыдущей главы мы усвоили, что масса тела растет с увеличением его скорости. Но никаких доказательств этого, похожих на те рассуждения с часами, которыми мы обосновали замедление времени, мы не привели. Сейчас, однако, мы можем доказать, что (как следствие принципа относительности и прочих разумных соображений) масса должна изменяться именно таким образом. (Мы должны говорить о «прочих соображениях» по той причине, что нельзя ничего доказать, нельзя надеяться на осмысленные выводы, не опираясь на какие-то законы, которые предполагаются верными.) Чтобы не изучать
законы преобразования силы, обратимся к столкновениям частиц. Здесь нам не понадобится закон действия силы, а хватит только предположения о сохранении энергии и импульса. Кроме того, мы предположим, что импульс движущейся частицы — это вектор, всегда направленный по ее движению. Но мы не будем считать импульс пропорциональным скорости, как это делал Ньютон. Для нас он будет просто некоторой функцией скорости. Мы будем писать вектор импульса в виде вектора скорости, умноженного на некоторый коэффициент
p=m0v. (16.8)
Индекс v у коэффициента будет напоминать нам, что это функция скорости v. Будем называть этот коэффициент «массой». Ясно, что при небольших скоростях это как раз та самая масса, которую мы привыкли измерять. Теперь, исходя из того принципа, что законы физики во всех системах координат одинаковы, попробуем показать, что формула для mv должна иметь вид m0/Ц(1-v2/c2).

Пусть у нас есть две частицы (к примеру, два протона), которые между собой совершенно одинаковы и движутся навстречу друг другу с одинаковыми скоростями. Их общий импульс равен нулю. Что с ними случится? После столкновения их направления движения должны все равно остаться противоположными, потому что если это не так, то их суммарный вектор импульса будет отличен от нуля, т. е. не сохранится. Раз частицы одинаковы, то и скорости их должны быть одинаковы; более того, они просто должны остаться прежними, иначе энергия при столкновении изменится. Значит, схема такого упругого обратимого столкновения будет выглядеть, как на фиг. 16.2,а: все стрелки одинаковы, все скорости равны. Предположим, что такие столкновения всегда можно подготовить, что в них допустимы любые углы 0 и что начальные скорости частиц могут быть любыми.
Фиг. 16.2. Упругое столкновение одинаковых тел, движущихся с равными скоростями в противоположных направлениях, при различном выборе систем координат.
Далее, напомним, что одно и то же столкновение выглядит по-разному, смотря по тому, как повернуты оси. Для удобства мы так повернем оси, чтобы горизонталь делила пополам угол между направлениями частиц до и после столкновения (фиг. 16.2,б). Это то же столкновение, что и на фиг. 16.2,а, но с повернутыми осями.

Теперь начинается самое главное: взглянем на это столкновение с позиций наблюдателя, движущегося на автомашине со скоростью, совпадающей с горизонтальной компонентой скорости одной из частиц. Как оно будет выглядеть? Наблюдателю покажется, что частица 1 поднимается прямо вверх (горизонтальная компонента у нее пропала), а после столкновения падает прямо вниз по той же причине (фиг. 16.3, а).
Фиг. 16.3. Еще две картины того же столкновения (видимые из движущихся автомашин).
Зато частица 2 движется совсем иначе, она проносится мимо с колоссальной скоростью и под малым углом (но этот угол и до и после столкновения одинаков). Обозначим горизонтальную компоненту скорости частицы 2 через и, а вертикальную скорость частицы 1 — через w.
Чему же равна вертикальная скорость utga частицы 2? Зная это, можно получить правильное выражение для импульса, пользуясь сохранением импульса в вертикальном направлении. (Сохранение горизонтальной компоненты импульса и так обеспечено: у обеих частиц до и после столкновения эта компонента одинакова, а у частицы 1 она вообще равна нулю. Так что следует требовать только сохранения вертикальной скорости utga.) Но вертикальную скорость можно получить, просто взглянув на это столкновение с другой точки зрения! Посмотрите на столкновение, изображенное на фиг. 16.3, а из автомашины, которая движется теперь налево со скоростью и. Вы увидите то же столкновение, но перевернутое «вверх ногами» (фиг. 16.3, б). Теперь уже частица 2 упадет и подскочит со скоростью w, а горизонтальную скорость и приобретет частица 1. Вы уже, конечно, догадываетесь, чему равна горизонтальная скорость utga; она равна wЦ(1-u2/c2) [см. уравнение (16.7)]. Кроме того, нам известно, что изменение вертикального импульса вертикально движущейся частицы равно
Dp=2mww
(двойка здесь потому, что движение вверх перешло в движение вниз). У частицы, движущейся косо, скорость равна v, ее компоненты равны u и wЦ(1-u2/c2), а масса ее mv. Изменение вертикального импульса этой частицы Dр'=2тvwЦ(1—u2/с2), так как в соответствии с нашим предположением (16.8) любая компонента импульса равна произведению одноименной компоненты скорости на массу, отвечающую этой скорости. Но суммарный импульс равен нулю. Значит, и вертикальные импульсы должны взаимно сократиться, отношение же массы, движущейся со скоростью w, к массе, движущейся со скоростью v, должно оказаться равным
mw/mv=Ц(1-u2/c2). (16.9).
Перейдем к предельному случаю, когда w стремится к нулю. При очень малых w величины v и u практически совпадут, mw®m0, a mv®mu. Окончательный результат таков:

Проделайте теперь такое интересное упражнение: проверьте, будет ли выполнено условие (16.9) при произвольных w, когда масса подчиняется формуле (16.10). При этом скорость v, стоящую в уравнении (16.9), можно найти из прямоугольного треугольника
Вы увидите, что (16.9) выполняется тождественно, хотя выше нам понадобился только предел этого равенства при w—>0. Теперь перейдем к дальнейшим следствиям, считая уже, что, согласно (16.10), масса зависит от скорости. Рассмотрим так называемое неупругое столкновение. Для простоты предположим, что из двух одинаковых тел, сталкивающихся с равными скоростями w, образуется новое тело, которое больше не распадается (фиг. 16.4,а).

Фиг. 16.4. Две картины неупругого соударения тел равной массы.
Массы тел до столкновения равны, как мы знаем, m0/Ц(1- w2/c2). Предположив сохраняемость импульса и приняв принцип относительности, можно продемонстрировать интересное свойство массы вновь образованного тела. Представим себе бесконечно малую скорость и, поперечную к скоростям w (можно было бы работать и с конечной скоростью и, но с бесконечно малым значением и легче во всем разобраться), и посмотрим на это столкновение, двигаясь в лифте со скоростью -u. Перед нами окажется картина, изображенная на фиг. 16.4, а. Составное тело обладает неизвестной массой М. У тела 1, как и у тела 2, есть компонента скорости и, направленная вверх, и горизонтальная компонента, практически равная w. После столкновения остается масса М, движущаяся вверх со скоростью u, много меньшей и скорости света и скорости w. Импульс должен остаться прежним; посмотрим поэтому, каким он был до столкновения и каким стал потом. До столкновения он был равен p~=2mwu, а потом стал р'=Muu. Но Mu из-за малости u, по существу, совпадает с М0. Благодаря сохранению импульса
М0=2mw. (16.11)
Итак, масса тела, образуемого при столкновении двух одинаковых тел, равна их удвоенной массе. Вы, правда, можете сказать: «Ну и что ж, это просто сохранение массы». Но не торопитесь восклицать: «Ну и что ж!», потому что сами-то массы тел были больше, чем когда тела неподвижны. Они вносят в суммарную массу М не массу покоя, а больше. Не правда ли, поразительно! Оказывается, сохранение импульса в столкновении двух тел требует, чтобы образуемая ими масса была больше их масс покоя, хотя после столкновения эти тела сами придут в состояние покоя!
§ 5. Релятивистская энергия
Немного выше мы показали, что зависимость массы от скорости и законы Ньютона приводят к тому, что изменения в кинетической энергии тела, появляющиеся в результате работы приложенных к нему сил, оказываются всегда равными

Потом мы продвинулись дальше и обнаружили, что полная энергия тела равна полной его массе, умноженной на с2. Продолжим эти рассуждения.
Предположим, что наши два тела с равными массами (те, которые столкнулись) можно «видеть» даже тогда, когда они оказываются внутри тела М. Скажем, протон с нейтроном столкнулись, но все еще продолжают двигаться внутри М. Масса тела М, как мы обнаружили, равна не 2m0 , a 2mw. Этой массой 2mw снабдили тело его составные части, чья масса покоя была 2m0; значит, избыток массы составного тела равен привнесенной кинетической энергии. Это означает, конечно, что у энергии есть инерция. Ранее мы говорили о нагреве газа и показали, что поскольку молекулы газа движутся, а движущиеся тела становятся массивнее, то при нагревании газа и усилении движения молекул газ становится тяжелее. Но на самом деле такое рассуждение является совершенно общим; наше обсуждение свойств неупругого соударения тоже показывает, что добавочная масса появляется всегда, даже тогда, когда она не является кинетической энергией. Иными словами, если две частицы сближаются и при этом образуется потенциальная или другая форма энергии, если части составного тела замедляются потенциальным барьером, производя работу против внутренних сил, и т. д.,— во всех этих случаях масса тела по-прежнему равна полной привнесенной энергии. Итак, вы видите, что выведенное выше сохранение массы равнозначно сохранению энергии, поэтому в теории относительности нельзя говорить о неупругих соударениях, как это было в механике Ньютона. Согласно механике Ньютона, ничего страшного не произошло бы, если бы два тела, столкнувшись, образовали тело с массой 2m0, не отличающееся от того, какое получилось бы, если их медленно приложить друг к другу. Конечно, из закона сохранения энергии мы знаем, что внутри тела имеется добавочная кинетическая энергия, но по закону Ньютона на массу это никак не влияет. А теперь выясняется, что это невозможно: поскольку до столкновения у тел была кинетическая энергия, то составное тело окажется тяжелее; значит, это будет уже другое тело. Если осторожно приложить два тела друг к другу, то возникает тело с массой 2т0; когда же вы их с силой столкнете, то появится тело с большей массой. А если масса отличается, то мы можем это заметить. Итак, сохранение импульса в теории относительности с необходимостью сопровождается сохранением энергии.
Отсюда вытекают интересные следствия. Пусть имеется тело с измеренной массой М, и предположим, что что-то стряслось и оно распалось на две равные части, имеющие скорости w и массы mw. Предположим теперь, что эти части, двигаясь через вещество, постепенно замедлились и остановились. Теперь их масса m0. Сколько энергии они отдали веществу? По теореме, доказанной раньше, каждый кусок отдаст энергию (mw-m0)с2. Она перейдет в разные формы, например в теплоту, в потенциальную энергию и т. д. Так как 2mw=M, то высвободившаяся энергия Е = (М-2m0)с2. Это уравнение было использовано для оценки количества энергии, которое могло бы выделиться при ядерном расщеплении в атомной бомбе (хотя части бомбы не точно равны, но примерно они равны). Масса атома урана была известна (ее измерили заранее), была известна и масса атомов, на которые она расщеплялась,— иода, ксенона и т. д. (имеются в виду не массы движущихся атомов, а массы покоя). Иными словами, и М и m0 были известны. Вычтя одно значение массы из другого, можно прикинуть, сколько энергии высвободится, если М распадется «пополам». По этой причине все газеты считали Эйнштейна «отцом» атомной бомбы. На самом же деле под этим подразумевалось только, что он мог бы заранее подсчитать выделившуюся энергию, если бы ему указали, какой процесс произойдет. Энергию, которая должна высвободиться, когда атом урана подвергнется распаду, подсчитали лишь за полгода до первого прямого испытания. И как только энергия действительно выделилась, ее непосредственно измерили (не будь формулы Эйнштейна, энергию измерили бы другим способом), а с момента, когда ее измерили, формула уже была не нужна. Это отнюдь не принижение заслуг Эйнштейна, а скорее критика газетных высказываний и популярных описаний развития физики и техники. Проблема, как добиться того, чтобы процесс выделения энергии прошел эффективно и быстро, ничего общего с формулой не имеет.
Формула имеет значение и в химии. Скажем, если бы мы взвесили молекулу двуокиси углерода и сравнили ее массу с массой углерода и кислорода, мы бы могли определить, сколько энергии высвобождается, когда углерод и кислород образуют углекислоту. Плохо только то, что эта разница масс так мала, что технически опыт очень трудно проделать.
Теперь обратимся к такому вопросу: нужно ли отныне добавлять к кинетической энергии m0c2 и говорить с этих пор, что полная энергия объекта равна mc2? Во-первых, если бы нам были видны составные части с массой покоя m0 внутри объекта M, то можно было бы говорить, что часть массы M есть механическая масса покоя составных частей, а другая часть — их кинетическая энергия, третья — потенциальная. Хотя в природе и на самом деле открыты различные частицы, с которыми происходят как раз такие реакции (реакции слияния в одну), однако никакими способами невозможно при этом разглядеть внутри M какие-то составные части. Например, распад K-мезона на два пиона происходит по закону (16.11), но бессмысленно считать, что он состоит из 2p, потому что он распадается порой и на Зp!
А поэтому возникает новая идея: нет нужды знать, как тела устроены изнутри; нельзя и не нужно разбираться в том, какую часть энергии внутри частицы можно считать энергией покоя тех частей, на которые она распадется. Неудобно, а порой и невозможно разбивать полную энергию mc2 тела на энергию покоя внутренних частей, их кинетическую и потенциальную энергии; вместо этого мы просто говорим о полной энергии частицы. Мы «сдвигаем начало отсчета» энергий, добавляя ко всему константу m0c2, и говорим, что полная энергия частицы равна ее массе движения, умноженной на с2, а когда тело остановится, его энергия есть его масса в покое, умноженная на с2.
И наконец, легко обнаружить, что скорость v, импульс Р и полная энергия Е довольно просто связаны между собой. Как это ни странно, формула m=m0/Ц(l-v2/c2) очень редко употребляется на практике. Вместо этого незаменимыми оказываются два соотношения, которые легко доказать:
Е2-P2c2=M02c4 (16.13)
и
Рс=Ev/c (16.14)
Глава 17
ПРОСТРАНСТВО - ВРЕМЯ
§ 1. Геометрия пространства-времени
§ 2. Пространственно-временные интервалы
§ 3. Прошедшее, настоящее, будущее
§ 4. Еще о четырехвекторах
§ 5. Алгебра четырехвекторов
§ 1. Геометрия пространства-времени
Теория относительности показывает, что связь между местоположением события и моментом, в какой оно происходит, при измерениях в двух разных системах отсчета совсем не такая, как можно было ожидать на основе наших интуитивных представлений. Очень важно ясно представить себе связь пространства и времени, возникающую из преобразований Лоренца. Поэтому мы глубже рассмотрим этот вопрос.

Координаты и время (х, y, z, t), измеренные «покоящимся» наблюдателем, преобразуются в координаты и время (х', y', z', t'), измеренные внутри «движущегося» со скоростью u космического корабля:
Давайте сравним эти уравнения с уравнением (11.5), которое тоже связывает измерения в двух системах, только одна из них теперь вращается относительно другой
х'=хcosq+ysinq,
у' = ycosq-xsinq, (17.2)
z'=z.
В этом частном случае у Мика и Джо оси х' и x повернуты на угол 0. Но и в том и в другом случае мы замечаем, что «штрихованные» величины — это «перемешанные» между собой «нештрихованные»: новое х' есть смесь х и у, а новое у' — другая смесь x и y.
Проведем следующую аналогию: когда мы глядим на предмет, мы различаем его «видимую ширину» и «видимую толщину». Но эти два понятия — «ширина» и «толщина» — отнюдь не основные свойства предмета. Отойдите в сторону, взгляните на предмет под другим углом — видимая ширина и видимая толщина предмета станут другими. Можно написать формулы, позволяющие узнать новые ширину и толщину по известным старым и по углу поворота. Уравнения (17.2) — как раз эти формулы. Можно сказать, что данная толщина есть своего рода «смесь» всех ширин и всех толщин. Если б мы не могли сдвинуться с места, если б мы на данный предмет всегда глядели из одного и того же положения, то нам все эти рассуждения показались бы неуместными; мы ведь и так всегда видели бы пред собой «настоящую» ширину и «настоящую» толщину и знали бы, что это совершенно разные качества предмета: один связан с углом, под каким виден предмет, другой требует фокусирования глаза и даже интуиции. Они казались бы абсолютно различными, их незачем было бы смешивать. Только потому, что мы в состоянии обойти вокруг предмета, мы понимаем, что ширина и толщина — это разные стороны одного и того же предмета.
Нельзя ли взглянуть на преобразование Лоренца таким же способом? Ведь и здесь перед нами смесь — смесь местоположения и момента времени. Из значений координаты и времени получается новая координата. Иначе говоря, в измерениях пространства, сделанных одним человеком, есть с точки зрения другого малая примесь времени. Наша аналогия позволяет высказать следующую мысль: «реальность» предмета, на который мы смотрим, включает нечто большее (говоря грубо и образно), чем его «ширину» и его «толщину», потому что обе они зависят от того, как мы смотрим на предмет. Оказавшись на новом месте, наш мозг немедленно пересчитывает и ширину, и толщину. Но когда мы будем двигаться с большой скоростью, наш мозг не сможет немедленно пересчитать координаты и время: у нас нет опыта движений со скоростями, близкими к световой, мы не ощущаем время и пространство как явления одной природы. Все равно как если бы нас усадили на какое-то место, заставили бы разглядывать ширину какого-то предмета и при этом не разрешали бы даже поворачивать голову. Мы теперь понимаем, что, будь у нас такая возможность, мы могли бы увидеть немножко от времени другого человека, как бы «заглянуть» сзади него.
Итак, мы должны попытаться представить себе предметы в мире нового типа, в котором время с пространством смешано в том же смысле, в каком предметы нашего привычного пространственного мира можно разглядывать с разных направлений. Мы должны считать, что предметы, занимающие некоторое место и существующие некоторый период времени, занимают некую «дольку» мира нового типа и что мы смотрим на эту «дольку» с разных точек зрения, когда движемся с разной скоростью. Этот новый мир, эта геометрическая реальность, в которой имеются «дольки», занимающие некоторое пространство и существующие некоторое время, называется пространством-временем. Данная точка (х, у, z, t) в пространстве-времени носит название события. Представьте, например, что ось х мы поместили горизонтально, оси у и z — в двух других направлениях, взаимно перпендикулярных и перпендикулярных к странице (!), а ось t направили вертикально. Как на такой диаграмме изобразится, скажем, движущаяся частица? Когда частица неподвижна, у нее есть какая-то координата х; время течет, а х остается все тем же, и тем же, и тем же. Значит, ее «путь» — это прямая, параллельная оси (а на фиг. 17.1).

Фиг. 17.1. Пути трех частиц в пространстве-времени. a — частица покоится в точке х=х0; b — частица отправилась из точки х= х0 с постоянной скоростью; с — частица начала было двигаться, но затормозила; d — распространение света.
С другой стороны, если она равномерно удаляется, то с течением времени растет и х (b на фиг. 17.1). Таким образом, частица, которая сперва двигалась, а потом стала замедлять свой ход, изобразится чем-то похожим на кривую с на фиг. 17.1. Другими словами, всякая устойчивая, нераспадающаяся частица изображается линией в пространстве-времени. А распадающаяся частица изобразится вилкой, потому что она превращается в две частицы, выходящие из одной точки.
А как обстоит дело со светом? Скорость света всегда одна и та же, значит, свет можно изображать прямыми линиями одинакового наклона (d на фиг. 17.1).

Итак, согласно высказанной нами идее, если происходит некое событие, например частица внезапно распадается в какой-то пространственно-временной точке (х, t) на две, то, если это для чего-нибудь нужно, поворотом осей можно получить значения х и t в новой системе (фиг. 17.2, а). Но это не так: ведь уравнение (17.1) не совпадает с преобразованием (17.2), в них по-разному расставлены знаки, в одном встречаются sin9 и cos0, а в другом — некоторые алгебраические
Фиг. 17.2. Два изображения распада частицы. а — неверное; 6 — верное.
величины. (Вообще-то иногда алгебраические величины выражаются через косинус и синус, но в данном случае это невозможно.) А все-таки эти выражения очень похожи. Как мы с вами увидим, нельзя представлять себе пространство-время в виде реальной обычной геометрии, и все из-за этой разницы в знаках. На самом деле, хотя мы этого пока не подчеркивали, оказывается, что движущийся наблюдатель должен пользоваться осями, равнонаклоненными к линии светового луча, и проектировать точку на эти оси при помощи отрезков, им параллельных. Это показано на фиг. 17.2, б. Мы не будем заниматься этой геометрией, она не особенно помогает; легче работать прямо с уравнениями.
§ 2. Пространственно-временные интервалы
Хотя геометрия пространства-времени не обычная (не евклидова), тем не менее эта геометрия очень похожа на евклидову, но в некоторых отношениях весьма своеобразная. Если это представление о геометрии правильно, то должны существовать такие функции координат и времени, которые не зависят от системы координат. К примеру, при обычных вращениях, если взять две точки, одну для простоты в начале координат обеих систем, а другую в любом другом месте, то в обеих системах координат расстояние между точками будет одинаково. Это первое свойство точек, которое не зависит от частного способа измерения: квадрат расстояния, или x2+y2+z2, не меняется при поворотах. А как с пространством-временем? Не трудно показать, что и здесь есть нечто, не зависящее от способа измерения, а именно комбинация c2t2-х2-у2-z2 одинакова до и после преобразования
с2t'2-х'2-у'2-z'2=c2t2-х2-y2-z2. (17.3)
Поэтому эта величина, подобно расстоянию, «реальна» в том смысле, который был придан этому слову выше; ее называют интервалом между двумя пространственно-временными точками, одна из которых в этом случае совпадает с началом координат. (Точнее говоря, это не интервал, а квадрат интервала, точно так же как и х2+у2+z2 — квадрат расстояния.) Это название подчеркивает различие в геометриях; обратите внимание, что в формуле присутствует с, а некоторые знаки обращены.
Давайте избавимся от с, оно нам не нужно, если мы хотим иметь удобное пространство, в котором х и t можно переставлять. Представьте, к какой путанице приведет измерение ширины по углу, под которым виден предмет, а толщины — по сокращению мышц при фиксировании глаза на предмет и выражение толщины в метрах, а ширины в радианах. При преобразованиях уравнений типа (17.2) тогда получится страшная неразбериха и ни за что не удастся разглядеть всю простоту и ясность предмета по той технической причине, что одно и то же будет измеряться двумя различными единицами. С помощью уравнений (17.1) и (17.3) природа говорит нам, что время равнозначно пространству; время становится пространством; их надо измерять в одинаковых единицах. Какое расстояние измеряет секунда? Из уравнения (17.3) это легко понять: секунда — это 3·108 м, расстояние, которое свет проходит за 1 сек. Иначе говоря, если бы расстояния и время мы измеряли в одинаковых единицах (секундах), то единицей длины было бы 3·108 м и уравнения упростились бы. А другой способ уравнять единицы — это измерять время в метрах. Чему равен метр времени? Метр времени — это время, за какое свет проходит расстояние в 1 .м, т. е. (l/3) ·10-8 сек, или 3,3 миллиардных доли секунды! Иными словами, нам нужно записать все уравнения в системе единиц, где с=1. Когда время и пространство станут измеряться в одинаковых единицах, уравнения, естественно, упростятся;

Может быть, вы сомневаетесь в законности этого или вас «пугает», что, положив с=1, вы не сможете вернуться к правильным уравнениям? Напротив, без с их гораздо легче запомнить, а с легко поставить на нужные места, если присмотреться к размерностям. Скажем, в Ц(1—u2) мы видим, что из неименованного числа 1 приходится вычитать именованное (квадрат скорости u2); естественно, этот квадрат нужно разделить на с2, чтобы сделать вычитаемое безразмерным. Таким путем можно расставить с, где полагается.
Очень интересно различие между пространством-временем и обыкновенным пространством, различие между интервалом и расстоянием. Посмотрите на формулу (17.5). Если два события произошли в какой-то системе координат в одно и то же время, по в разных точках пространства, то, поместив начало координат в точку, изображающую одно из событий, мы получим, что t=0, а, например, х№0. Значит, квадрат интервала получится отрицательным, а сам интервал — мнимым (корень квадратный из отрицательного числа). Интервалы в этой теории бывают и действительные, и мнимые, потому что их квадраты могут быть и положительными, и отрицательными (в отличие от расстояния, квадрат которого бывает только положительным). Когда интервал мнимый, говорят, что интервал между двумя событиями (точками) пространственно-подобный (а не мнимый), потому что такой интервал получался бы всегда, если бы весь мир застыл на одном времени. С другой стороны, если два предмета в данной системе координат попадают в одно и то же место в разные моменты времени, тогда t№0, a x=y=z=0 и квадрат интервала положителен; это называется времени-подобным интервалом. Далее, если провести на диаграмме пространства-времени две прямые под углом 45° (в четырех измерениях они обратятся в «конус», называемый световым), то точки на этих прямых будут отделены от начала координат нулевым интервалом. Куда бы из начала координат ни распространялся свет, все равно x2+y2+z2=c2t2, т. е. интервал между событием прихода света в любую точку и началом всегда равен нулю [как легко видеть из (17.5)]. Кстати, мы сейчас доказали, что скорость света в любых системах координат одинакова: ведь если интервал в обеих системах одинаков, то, будучи равен нулю в одной из них, он равен нулю и в другой, и квадрат скорости света — отношение x'2+y'2+z'2 к t'2— опять равен с2.
Сказать, что скорость распространения света — инвариант,— это все равно, что сказать, что интервал равен нулю.
§ 3. Прошедшее, настоящее, будущее

Пространственно-временную область, окружающую данную точку пространства-времени, можно разделить на три области, как показано на фиг. 17.3.
Фиг. 17.3. Область пространства-времени, окружающая начало координат.
В одной из них интервалы пространственно-подобны, в остальных двух — времени-подобны. Эти три области, на которые распадается окружающее точку пространство-время, в физическом отношении связаны с самой точкой очень интересно.
Из области 2 физический объект или сигнал, двигаясь со скоростью, меньшей скорости света, может прийти в точку О. Поэтому события в этой области могут воздействовать на событие в точке (9, могут влиять на него из прошлого (t<0). Действительно, предмет в точке Р на оси отрицательных t оказывается точно в «прошлом» по отношению к точке О; Р — это та же пространственно-временная точка О, но в более ранний момент времени. Что в ней когда-то случилось, теперь сказывается на точке О. (К сожалению, именно такова наша жизнь.) Другой предмет из Q попадет в О, двигаясь с определенной скоростью, меньшей, чем с; значит, если бы этот предмет двигался в космическом корабле, он мог бы тоже оказаться прошлым той же точки О пространства-времени. Это означает, что в какой-то другой системе координат ось времени могла бы пройти через О и Q. Таким образом, все точки области 2 оказываются по отношению к О в «прошлом»; все, что в этой области происходит, может сказаться на О. Поэтому область 2 можно назвать воздействующим прошлым; это геометрическое место всех событий, которые хоть каким-то образом могут повлиять на событие в точке О.
А зато область 3 — это та область, на которую в свою очередь могут повлиять события в О; в тела, расположенные внутри области 3, можно «попасть пулей», скорость которой меньше скорости света. Это тот мир, чье будущее в наших руках (если мы сами находимся в точке О); область 3 можно назвать воздействуемым будущим. Остальное пространство-время (область 1) интересно тем, что на события в нем из точки О влиять нельзя и, обратно, ничто, происходящее в этой области, никак не может повлиять на положение в точке О, потому что ничто не может обогнать свет. Конечно, если что-то произойдет в точке R, это может сказаться позднее; если, например, Солнце «сию минуту» взорвется, то мы узнаем об этом лишь через 8 минут, и раньше этого времени взрыв никак отразиться на нас не может.
То, что происходит «сейчас», «сию минуту» — это на самом деле нечто таинственное; оно не поддается определению, не поддается и воздействию, однако несколько позже оно может воздействовать на нас (или мы на него, если какое-то время тому назад мы позаботились об этом). Когда мы смотрим на звезду Альфа Центавра, мы видим ее такой, какой она была 4 года тому назад; нам может захотеться узнать, на что она похожа «сейчас». «Сейчас» — это значит в этот же момент в нашей системе координат. Альфу Центавра мы можем видеть только при помощи световых лучей, явившихся к нам из нашего прошлого, прошлого четырехлетней давности, но что на ней происходит «сейчас», мы не знаем. Происходящее на ней «сейчас» сможет воздействовать на нас только через четыре года. «Альфа Центавра сейчас» — это идея, или понятие, существующее в нашем мозге; никакого физического определения для такого понятия в этот момент нет, потому что надо подождать, прежде чем «сейчас» удастся увидеть; для Альфы Центавра даже правильное понятие «сейчас» не поддается определению сию минуту. Ведь «сейчас» зависит от системы координат. Если бы, к примеру, Альфа Центавра двигалась, то наблюдатель на ней не согласился бы с нашим пониманием его «сейчас», потому что его оси координат были бы повернуты на какой-то угол, а его «сейчас» было бы совсем другим временем. Мы уже говорили, что одновременность не определяется однозначно.
Встречаются порой предсказатели судьбы, гадалки, люди, утверждающие, что они могут узнавать будущее; немало чудесных историй рассказывается и о людях, которые внезапно видят перед собой свое воздействуемое будущее. От этого возникает множество парадоксов: ведь если мы знаем, что что-то случится, то наверняка сможем избежать этого, если захотим. На самом же деле ни один провидец будущего не способен узнать даже настоящее! Нам никто не скажет, что сию минуту происходит достаточно далеко от нас, потому что это ненаблюдаемо.
Напоследок я задам вопрос, ответить на который предоставляю вам самим. Если бы внезапно появилась возможность знать, что происходит в области 1 пространства-времени,— возник бы от этого парадокс или нет?
§ 4. Еще о четырехвекторах
Вернемся опять к аналогии между преобразованием Лоренца и вращением пространственных осей. Мы уже убедились, что полезно собирать воедино отличные от координат величины, которые преобразуются так же, как и координаты; эти соединенные величины называют векторами, или направленными отрезками. При обычных вращениях немало величин преобразуется в точности так же, как х, y, z (например, скорость с тремя компонентами х, у, z); при переходе из одной системы координат в другую ни одна из компонент не остается прежней, все они приобретают новые значения. Но «сама» скорость, во всяком случае, более реальна, чем любая из ее компонент, и изображаем мы ее направленным отрезком.
Теперь мы спросим: существуют ли величины, которые преобразуются при переходе от неподвижной системы к движущейся так же, как и х, у, z, t? Наш опыт обращения с векторами подсказывает, что три из этих величин, подобно х, у, z, могли бы представлять собой три компоненты обычного пространственного вектора, а четвертая могла бы оказаться похожей на обычный скаляр относительно пространственных вращений: она бы не изменялась, пока мы не перейдем в движущуюся систему координат. Возможно ли, однако, связать с одним из известных «тривекторов» некоторый четвертый объект (который можно назвать «временной компонентой») таким образом, чтобы вся четверка «вращалась» точно так же, как изменяются пространство и время в пространстве-времени? Мы сейчас покажем, что действительно существует по крайней мере одна такая четверка (на самом деле далеко не одна): три компоненты импульса и энергия в качестве временной компоненты преобразуются вместе и образуют так называемый «четырехвектор». Доказывая это, мы избавимся от с тем же приемом, какой употреблялся в уравнении (17.4). Например, энергия и масса отличаются только множителем с2 и при надлежащем выборе единиц измерения энергия совпадет с массой. Вместо того чтобы писать Е=тс2, мы положим Е=т. Если понадобится, в окончательных уравнениях можно опять расставить с в нужных степенях.
Итак, уравнения для энергии и импульса имеют вид

Значит, при таком выборе единиц получится
Скажем, если энергия выражена в электронвольтах (эв), то чему равна масса в 1 эв? Она равна массе с энергией покоя 1 эв, т. е. m0c2=1 эв. У электрона, например, масса покоя равна 0,511·106 эв.
Как же будут выглядеть импульс и энергия в новой системе координат? Чтобы узнать это, надо преобразовать уравнения (17.6). Это преобразование легко получить, зная, как преобразуется скорость. Пусть некоторое тело имело скорость v, а мы наблюдаем за ним из космического корабля, который сам имеет скорость u, и обозначаем соответствующие величины штрихами. Для простоты сперва мы рассмотрим случай, когда скорость v направлена по скорости и. (Более общий случай мы рассмотрим позже.) Чему равна скорость тела v' по измерениям из космического корабля? Эта скорость равна «разности» между v и u. По прежде полученному нами закону
v’=(v-u)/(1-uv’) (17-8)
Теперь подсчитаем, какой окажется энергия Е' по измерениям космонавта. Он, конечно, воспользуется той же массой покоя, но зато скорость станет v'. Он возведет v' в квадрат, вычтет из единицы, извлечет квадратный корень и найдет обратную величину


Энергия Е' просто равна массе m0, умноженной на это выражение. Но нам хочется выразить энергию через нештрихованные энергию и импульс. Мы замечаем, что
или


Мы узнаем в этом выражении знакомое нам преобразование
Теперь мы должны найти новый импульс рх. Он равен энергии Е', умноженной на v', и так же просто выражается через Е и р:

и мы опять распознаем в этой формуле знакомое нам

Итак, преобразование старых энергии и импульса в новые энергию и импульс в точности совпало с преобразованием t и х в t' и х и t в х': если мы в уравнениях (17.4) будем писать Е каждый раз, когда увидим t, а вместо x: всякий раз будем подставлять рх, то уравнения (17.4) превратятся в уравнения (17.10) и (17.11). Если все верно, то это правило предполагает добавочные равенства р'у=-рy и р'z=рz. Чтобы их доказать, надо посмотреть, как преобразуется движение вверх или вниз. Но как раз в предыдущей главе мы рассмотрели такое движение. Мы анализировали сложное столкновение и заметили, что поперечный импульс действительно не меняется при переходе в движущуюся систему координат. Стало быть, мы уже убедились, что р'у=ру и pz=pz. Итак, полное преобразование равно
Таким образом, эти преобразования выявили четыре величины, которые преобразуются подобно х, у, z, t. Назовем их четырехвектор импульса. Так как импульс — это четырехвектор, его можно изобразить на диаграмме пространства-времени движущейся частицы в виде «стрелки», касательной к пути (фиг. 17.4).

Фиг. 17.4. Четырехвектор импульса частицы.
У этой стрелки временная компонента дает энергию, а пространственные — тривектор импульса; сама стрелка «реальнее», чем один только импульс или одна лишь энергия: ведь и импульс, и энергия зависят от нашей точки зрения.
§ 5. Алгебра четырехвекторов
Четырехвекторы обозначаются иначе, чем тривекторы. Например, тривектор импульса обозначают р. Если хотят дать более детальную запись, то говорят о трех компонентах рх ,pу, рz; можно писать и короче рi , оговаривая, что i принимает три значения х, у и z. Для четырехвекторов мы будем применять похожее обозначение: будем писать рm , а m. пусть заменяет собой четыре направления t, x, у, z.
Конечно, можно пользоваться любыми обозначениями. Не улыбайтесь, что мы так много говорим об обозначениях; учитесь изобретать их: в них вся сила. Ведь и сама математика в значительной степени состоит в изобретении лучших обозначений. Идея четырехвектора — это тоже усовершенствование обозначений с таким расчетом, чтобы преобразования было легче запомнить.
Итак, Аm — это общий четырехвектор, рm — четырехимпульс, pt — энергия, рх— импульс в направлении х, рy— в направлении у, pz— в направлении z. Складывая четырехвекторы, складывают их соответствующие компоненты.

Если четырехвекторы связаны каким-то уравнением, то это значит, что уравнение выполняется для любой компоненты. Например, если закон сохранения тривектора импульса соблюдается в столкновении частиц, т. е. сумма импульсов множества взаимодействующих или сталкивающихся частиц постоянна, то это означает, что сумма всех компонент импульсов постоянна и в направлении х, и в направлении у, и в направлении 2. Сам по себе такой закон в теории относительности невозможен: он неполон; это все равно, что говорить только о двух компонентах тривектора. Неполон он потому, что при повороте осей разные компоненты смешиваются, значит, в закон сохранения должны войти все три компоненты. Таким образом, в теории относительности нужно дополнить закон сохранения импульса, включив в него сохранение временной компоненты. Абсолютно необходимо, чтобы сохранение первых трех компонент сопровождалось сохранением четвертой, иначе не получится релятивистской инвариантности. Четвертое уравнение — это как раз сохранение энергии; оно должно сопровождать сохранение импульса для того, чтобы четырехвекторные соотношения в геометрии пространства-времени были справедливы. Итак, закон сохранения энергии и импульса в четырехмерном обозначении таков:

или в чуть измененных обозначениях:
где i=l, 2, ... относится к сталкивающимся частицам, j=1, 2,... — к частицам, возникающим при столкновении, а m=x, у, z или t. Вы спросите: «А что по осям координат?» Это неважно. Закон верен для любых компонент, при любых осях.
В векторном анализе нам встретилось одно понятие — скалярное произведение двух векторов. Что соответствует ему в пространстве-времени? При обычных вращениях неизменной остается величина x2+y2+z2. В четырехмерном мире таким свойством при преобразованиях обладает величина t2-х2-у2-z2 [уравнение (17.3)]. Как можно это записать? Можно было бы, например, пользоваться значком наподобие  , но обычно пишут
, но обычно пишут

Штрих при S напоминает, что первый, «временной» член положителен, а остальные три отрицательны. Эта величина одна и та же в любой системе координат, и можно назвать ее квадратом длины четырехвектора. Чему равен, например, квадрат длины четырехвектора импульса отдельной частицы?
Ответ: р2t-р2x-Р2у-p2z, или, иначе, Е2-р2, потому что pt это и есть Е. Чему равно Е2 -р2? Должно по условию получиться что-то, что одинаково в любой системе координат, в частности и в системе координат, которая движется вместе с частицей, так что частица в этой системе покоится. Но если частица неподвижна, значит, у нее нет импульса. Значит, у нее остается только энергия, совпадающая в этом случае с ее массой. Итак, Е2-р2=m20, т. е. квадрат длины четырехвектора импульса равен m20.

Пользуясь выражением для квадрата вектора, легко изобрести скалярное произведение двух четырехвекторов: если один из них аm , а другой bm, то скалярное произведение определяется так:
Это выражение не меняется при преобразовании системы координат.
Следует еще упомянуть о частицах с нулевой массой покоя, например о фотоне — частице света. Фотон похож на частицу тем, что он переносит энергию и импульс. Энергия фотона равна произведению некоторой постоянной (постоянная Планка) на частоту света: E,=hv. Такой фотон несет с собой и импульс, который (как у всякой частицы) равен постоянной h, деленной на длину волны света: p=h/l. Но у фотона связь между частотой и длиной волны вполне определенна: v—c/l. (Количество волн, проходящих за 1 сек, помноженное на их длину, даст расстояние, проходимое светом в 1 сек, т. е. с.) Мы сходу получаем, что энергия фотона равна его импульсу, умноженному на с, и, далее, полагая с = 1, что энергия равна импульсу. Но это и значит, что масса покоя равна нулю. Давайте вдумаемся в это любопытное обстоятельство. Если фотон — частица с нулевой массой покоя, то что с ним бывает, когда он останавливается? Но он никогда не останавливается! Он всегда движется со скоростью с. Обычная формула для энергии — это m0/Ц(1-v2). Можно ли утверждать, что при m0=0 и v=1 энергия фотона равна нулю? Нет, нельзя; на самом деле фотон может обладать (и обладает) энергией, хоть и не имеет массы покоя, за счет того, что всегда движется со скоростью света!
Мы знаем также, что импульс любой частицы равен произведению полной энергии на скорость: p=vE при с=1, или, в обычных единицах, p=vE/c2. Для любой частицы, движущейся со скоростью света, р=Е, если с=1. Формулы для энергии фотона в движущейся системе даются по-прежнему уравнением (17.12), но вместо импульса туда нужно подставить энергию, умноженную на с (на 1). Изменение энергии при преобразовании означает изменение частоты света. Это явление называется эффектом Допплера; формулу для него легко получить из уравнения (17.12), положив Е=р и E=hv.
Как сказал Минковский: «Пространство само по себе и время само по себе погрузятся в реку забвенья, а останется жить лишь своеобразный их союз».
Глава 18
ДВУМЕРНЫЕ ВРАЩЕНИЯ
§ 1. Центр масс
§ 2. Вращение твердого тела
§ 3. Момент количества движения
§ 4. Закон сохранения момента количества движения
§ 1. Центр масс
В предыдущих главах мы изучали механику точек, или маленьких частиц, внутренняя структура которых нас совершенно не интересовала. В последующих нескольких главах мы изучим применение законов Ньютона к более сложным вещам. Но ведь чем сложнее объект, тем он интереснее, и вы сами увидите, что явления, связанные с такими более сложными объектами, поистине поразительны. Разумеется все эти явления не содержат ничего большего, чем комбинации законов Ньютона, однако временами просто трудно поверить, что все это произошло из F=ma!
Что это за более сложные объекты, с которыми мы будем иметь дело в дальнейшем? Это может быть течение воды, вращение галактик и т. д. Но сначала давайте разберемся с наиболее простым из сложных объектов—твердым телом. Этим термином мы будем называть монолитный объект, который одновременно с изменением положения может еще и вращаться как целое. Впрочем, даже такой простой объект может двигаться достаточно сложно, поэтому давайте сначала рассмотрим наиболее простой случай движения, когда тело крутится вокруг неподвижной оси, причем каждая точка этого тела движется в плоскости, перпендикулярной к этой оси. Такое вращение тела вокруг неподвижной оси называется плоским, или двумерным. Позднее, когда мы обобщим наш результат на случай трех измерений, вы увидите, что вращение гораздо более хитрая штука, чем механика частицы, и без достаточного опыта в двух измерениях понять трехмерные вращения очень трудно.
К первой интересной теореме о движении сложного тела можно прийти следующим образом: попробуйте бросить какой-нибудь предмет, состоящий из множества скрепленных между собой кубиков и стержней. Вы знаете, конечно, что он полетит по параболе; это мы обнаружили еще, когда изучали движение точки. Однако теперь наш объект не точка. Он поворачивается, покачивается и все же летит по параболе; вы можете в этом убедиться. Какая, же точка тела описывает параболу? Ну разумеется, не угол кубика, потому что он поворачивается, не конец стержня, не его середина и не центр кубика. Но все-таки что-то движется по параболе, существует некий эффективный «центр», который движется по параболе. Таким образом, первая теорема о сложных объектах говорит, что существует какая-то «средняя» точка, вполне определенная математически, которая движется по параболе. Точка эта не обязательно находится в самом теле, она может лежать и где-то вне его.
Это так называемая теорема о центре масс, и доказывается она следующим образом.

Любой объект можно рассматривать как множество маленьких частичек, атомов, связанных различными силами. Пусть i обозначает номер одной из таких частиц (их страшно много, поэтому i может быть равно, например, 1023). Сила, действующая на i-ю частицу, равна массе, умноженной на ускорение этой частицы:
В последующих главах наши движущиеся объекты и все их части будут двигаться со скоростями, много меньшими, чем скорость света, и поэтому для всех величин мы будем рассматривать только нерелятивистское приближение. Масса при этих условиях будет постоянна, так что


Если теперь сложить все силы, действующие на частицы, т. е. сложить все Fi- со всеми значениями индекса, то в результате мы должны получить полную силу F. Складывая же правые части уравнения (18.2) для всех частиц и вспоминая, что производная от суммы равна сумме производных, получаем
Поэтому полная сила равна второй производной от суммы произведений масс частиц на их положение.
Но полная сила, действующая на все частицы,— это то же самое, что и внешняя сила. Почему? Да потому что, какие бы силы ни действовали между частицами, пусть это будет притяжение или отталкивание, или атомные силы, все равно, когда мы складываем их вместе и применяем Третий закон Ньютона, по которому силы действия и противодействия между любыми двумя частицами равны друг другу, то эти взаимные силы сокращаются друг с другом и в результате останутся только силы, действующие со стороны атомов, находящихся вне тела. Так что, если уравнение (18.3) представляет собой сумму по некоторому числу частиц, образующих наш объект, то внешняя сила, действующая на него, равна просто сумме всех сил, действующих на все частицы, образующие этот объект. Уравнение (18.3) неплохо было бы записать в виде полной массы тела, умноженной на какое-то ускорение. Сделать это можно. Пусть М будет суммой масс всех частиц, т. е. полной массой тела. Если теперь определить вектор R как
то, поскольку М постоянна, уравнение (18.3) перейдет в


Таким образом, внешняя сила равна полной массе, умноженной на ускорение некоторой точки R; эта точка и называется центром масс тела. Она расположена где-то в «середине» тела — некое среднее r, в котором различные ri учитываются в зависимости от их важности, т. е. в зависимости от того, какую долю вносят они в полную массу.
Мы подробно обсудим эту важную теорему несколько позднее, а сейчас остановимся на двух примерах. Пусть на тело не действуют никакие внешние силы, скажем, оно плавает где-то в пустом пространстве. Оно может делать все, что ему угодно: крутиться, покачиваться, изгибаться, но при этом его центр масс, эта искусственно выделенная нами математическая точка, должен двигаться, с постоянной скоростью. В частности, если вначале этот центр покоился, то он так и будет покоиться все время. Поэтому если мы возьмем какой-то космический корабль со всеми его пассажирами, вычислим его центр масс и обнаружим, что он стоит на месте, то можно быть уверенным, что центр масс так и останется на месте, если только на корабль не будут воздействовать какие-то внешние силы. Сам корабль, конечно, может немного перемещаться, но это потому, что пассажиры внутри корабля ходят взад и вперед. Так, если все пассажиры одновременно перейдут в носовую часть, то корабль немного подастся назад, чтобы среднее положение всех масс осталось в точности на том же самом месте.
Означает ли это, что в результате неподвижности центра масс ракета не может двигаться вперед? Конечно, нет, но, чтобы продвинуть вперед интересующую нас часть ракеты, мы что-то должны выбросить назад. Иными словами, если вначале ракета покоилась, а затем выбросила из сопла некоторое количество газа, то газ этот полетит назад, а сама ракета полетит при этом вперед, однако центр масс останется точно на том же месте, где он был и раньше. Так что в ракете интересующая нас часть продвинется вперед за счет другой, которая улетит назад.
Второе замечание относительно движения центра масс. Его можно рассматривать отдельно от всех «внутренних» движений тела и, следовательно, его можно не учитывать при изучении вращения. Собственно поэтому мы начали изучать вращения с центра масс.
§ 2. Вращение твердого тела
Поговорим теперь о вращении. Как известно, обычные предметы не вращаются просто так: они колеблются, вибрируют, изгибаются. Поэтому, чтобы упростить рассуждения, рассмотрим движение несуществующего идеального объекта, который мы назвали твердым телом. В таком объекте связи между атомами столь сильны, что те небольшие силы, которые необходимы, чтоб привести его в движение, не могут деформировать тело. Форма его все время остается одной и той же. Если мы хотим изучить движение такого тела и условимся не принимать во внимание движение его центра масс, то ему остается лишь вращаться. Вот это вращение мы и должны описать. Каким образом? Предположим, что в теле существует какая-то воображаемая неподвижная линия (она может проходить через центр масс, а может и не проходить); вокруг этой линии, как вокруг оси, вращается наше тело. Но как все-таки определить, что такое вращение? Сделать это совсем просто. Отметив какую-то точку на теле, где угодно, только не на оси, и зная, куда она перешла через некоторый промежуток времени, мы точно можем сказать, в каком положении находится тело. Единственное, что нужно знать для описания положения точки, - это угол. Таким образом, изучение вращения заключается в изучении изменения угла со временем.
Чтобы описать вращение, измерим угол, на который поворачивается тело. Разумеется, речь идет не об угле между двумя точками внутри самого тела или на теле, а об угловом изменении положения всего тела как целого от одного момента времени до другого.
Сначала давайте разберемся с кинематикой вращения. Изменение угла со временем очень похоже на изменение положения при одномерном движении; для плоского вращения мы можем говорить об угловом положении и угловой скорости. Между этими двумя движениями — плоским вращением и одномерным перемещением — существует очень интересная связь: почти каждая величина в одном случае имеет свой аналог в другом. Прежде всего угол q, указывающий, насколько повернулось тело, соответствует пройденному точкой расстоянию s. Угловая скорость w=dq/dt, которая показывает, с какой быстротой изменяется угол, соответствует обычной скорости v=ds/dt, описывающей быстроту изменения положения. Если угол измеряется в радианах, то угловая скорость w равна какому-то числу радиан в секунду. Чем больше угловая скорость, тем быстрее вращается объект и тем быстрее изменяется угол. Если продифференцировать угловую скорость по времени, то получим величину a=dw/dt, которую мы будем называть угловым ускорением. Оно может служить аналогом обычного ускорения.
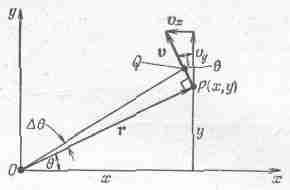
Теперь нам следует связать динамику вращения с динамикой частиц, из которых сделано тело, т. е. выяснить, как движется каждая данная частица, если угловая скорость составляет столько-то радиан в секунду. Для этого давайте возьмем какую-то частицу, расположенную на расстоянии r от оси, и будем, как обычно, говорить, что в данный момент времени она находится в определенном положении Р(х, у) (фиг. 18.1).
Фиг. 18.1. Кинематика двумерного вращения.
Через промежуток времени Dt тело целиком повернется на угол Dq, а вместе с ним повернется и наша частица. Хотя расстояние от нее до оси вращения О остается тем же самым, она уже переместится в другую точку, Q. Первое, что хотелось бы знать, это насколько изменятся расстояния х и y. Если обозначить через r длину ОР, то длина PQ будет равна rDq (просто по определению угла). Тогда изменение расстояния х будет равно проекции rDq на ось х
Dz=-PQsinq =-гDqy/r=-y/Dq. (18.6)
Аналогично,
Dy=xDq. (18.7)
Если тело вращается с угловой скоростью w, то, деля обе части равенства (18.6) и (18.7) на Dt, найдем компоненты скорости частицы
vx=-wx и vy=wy. (18.8)

Если же нам требуется абсолютная величина скорости, то мы просто пишем
Не удивительно, что абсолютная величина скорости получилась равной wr; это же очевидно; ведь полное пройденное расстояние равно rDq, а поэтому расстояние, пройденное за 1 сек, будет rDq/Dt, или rw.
Перейдем теперь к рассмотрению динамики вращения. Здесь следует ввести новое понятие — силу. Давайте посмотрим, нельзя ли изобрести нечто, играющее ту же роль, что и сила в линейном движении. Это нечто мы будем называть моментом силы, или просто моментом. Обычно под силой мы понимаем нечто, заставляющее покоящееся тело двигаться, а то, что заставляет тело вращаться, есть «вращающая», или «крутящая», сила; ее мы называем моментом. Таким образом, качественно момент силы — это кручение; но что такое момент силы количественно? Количественную теорию момента можно получить, изучая работу, затраченную на поворот тела. Этот подход очень хорош и для определения силы: если мы знаем, какая требуется работа, чтобы совершить данное перемещение, то знаем и силу. Чтобы продолжить соответствие между угловыми и линейными величинами, мы должны приравнять работу, которая производится при повороте тела на какой-то угол, к произведению момента на этот угол. Другими словами, при таком определении момента теорема о работе имеет абсолютный аналог: работа есть сила на перемещение, или момент на угол. Это сразу говорит нам, что такое момент количественно. Рассмотрим, например, твердое тело, вращающееся вокруг оси, на которое действуют различные силы. Сконцентрируем сначала наше внимание на одной силе, приложенной к некоторой точке (х, у). Какую работу мы затрачиваем, поворачивая тело на некоторый малый угол Dq? Нетрудно понять, что она равна
DW=FxDx+FyDy. (18.10)
Теперь нужно только подставить выражения (18.6) и (18.7) для Dx; и Dy и получить
DW=(xFy-yFx) Dq, (18.11)
т. е. работа, которую мы проделали, равна углу, на который было повернуто тело, умноженному на какую-то странную комбинацию сил и расстояний. Эта «странная комбинация» и есть момент. Таким образом, определяя изменение работы как момент, умноженный на угол поворота, мы получаем формулу, выражающую момент через силы. (Это понятно. Поскольку момент не является полностью новым понятием, не зависящим от механики Ньютона, то он должен определенным образом выражаться через силу.)

Пусть теперь на тело действует несколько сил. Тогда работа, производимая этими силами, равна сумме работ от каждой силы, так что DW будет иметь вид суммы множества членов: по одному для каждой из сил, однако каждый из них пропорционален Dq. Эту величину Dq можно вынести за скобку и получить, что работа равна сумме моментов от всех действующих сил, умноженной на Dq. Эту сумму можно назвать полным моментом сил и обозначить t. Как видите, моменты складываются по обычным законам алгебры, однако, как вы узнаете после, это происходит из-за того, что мы ограничиваемся только плоскими вращениями. Эта ситуация напоминает одномерное движение, в котором силы просто складываются алгебраически; ведь все они в этом случае действуют вдоль одной и той же прямой. В трехмерном пространстве все более сложно. Таким образом, для двумерного вращения
Нужно только помнить, что это справедливо лишь для вращения вокруг одной оси. Если брать различные оси, то все хi и yi изменятся, соответственно изменяются (обычно) и величины моментов.
Отвлечемся теперь на минуту и заметим, что предыдущий способ введения момента дает очень важный результат для тела, находящегося в равновесии: если сбалансированы все силы, действующие на объект, и перемещающие и вращающие, то нужно, чтобы не только полная сила была равна нулю, но и полный момент, так как при малом перемещении объекта, находящегося в равновесии, никакой работы не производится. Следовательно, из того, что DW=tDq=0, можно заключить, что сумма всех моментов должна быть равна нулю. Таким образом, для равновесия необходимо выполнение двух условий: а) сумма всех сил равна нулю и б) сумма всех моментов тоже равна нулю. Попробуйте доказать сами, что в двумерном случае достаточно равенства нулю суммы моментов сил относительно какой-либо одной оси.

Вернемся теперь к случаю одной силы, действующей на тело, и попытаемся выяснить, что же геометрически означает странное выражение xFy-yFx. На фиг. 18.2 вы видите силу F, приложенную в точке Р.
Фиг. 18.2. Вращающий момент, создаваемый силой.
Когда тело поворачивается на малый угол Dq, то естественно, что произведенная при этом работа равна составляющей в направлении перемещения, умноженной на величину перемещения. Иначе говоря, работает только тангенциальная составляющая силы, которая умножается на расстояние rDq. Поэтому момент равен тангенциальной составляющей силы (перпендикулярной к радиусу), умноженной на радиус. Это хорошо согласуется с нашим первоначальным понятием момента, потому что полностью радиальная сила не может крутить тело. Крутящее действие силы, очевидно, происходит только от той ее части, которая не тянет тело от центра. Она и называется тангенциальной составляющей, Ясно, кроме того, что данная сила закручивает тело тем сильнее, чем дальше от центра она приложена. Попробуйте раскрутить тело давлением прямо на его ось! Таким образом, тот факт, что момент силы пропорционален как радиальному расстоянию, так и тангенциальной составляющей силы, имеет свой смысл,
Существует еще третье, очень интересное выражение для момента силы. Как вы только что узнали, момент силы равен силе, умноженной на радиус и на синус угла а (см. фиг. 18.2), Если теперь продолжить линию действия силы и провести прямую, перпендикулярную к ней, то нетрудно видеть, что длина OS (она часто называется плечом силы) во столько раз короче радиуса, во сколько тангенциальная составляющая силы меньше полной ее величины. Поэтому можно записать, что момент равен произведению величины силы на длину ее плеча.
Мы не знаем точно, откуда произошел термин «момент силы» — по-видимому, от латинского movimentum, что означает способность силы двигать объект (используя какой-либо рычаг), тем более заметную, чем длинней плечо силы. Кстати, в математике слово «момент» означает усреднение с весом, в качестве которого взято расстояние до оси.
§ 3. Момент количества движения
Хотя до сих пор мы рассматривали только специальный случай твердого тела, свойства момента и его математическое выражение интересны даже тогда, когда тело не твердое. Можно доказать очень интересную теорему: подобно тому как внешняя сила равна скорости изменения величины р, которая называется полным импульсом системы частиц, так и момент силы равен скорости изменения некоторой величины L, называемой моментом количества движения, или угловым моментом группы частиц. Чтобы доказать это, рассмотрим систему частиц, на которую действуют силы, и посмотрим, что произойдет с системой в результате действия вращающих моментов, созданных этими силами. Для начала давайте возьмем только одну частицу. Такая частица с массой m и осью О изображена на фиг. 18.3.

Фиг. 18.3. Движение частиц относительно оси вращения С
Она не обязательно должна вращаться по окружности вокруг оси О, а может двигаться и по эллипсу, подобно планете вокруг Солнца, или по какой-нибудь другой кривой. Главное то, что она движется, что на нее действует сила, которая ускоряет ее в соответствии с обычными законами: x-компонента силы равна массе, умноженной на x-компоненту ускорения, и т. д. Но посмотрим теперь, как действует момент силы. Он, как вы знаете, равен xFy-yFx, а х- и у-компоненты силы в свою очередь равны массе, умноженной соответственно на х- и y-компоненту ускорения, так что


Хотя сразу и не видно, что это выражение является производной от какой-то простой величины, но на самом деле оно равно производной от xm(dy/dt)-ym(dx/dt). Действительно,
Оказывается, таким образом, что момент силы равен скорости изменения со временем некоторой величины! Давайте обратим внимание на эту величину и прежде всего дадим ей имя. Она будет называться моментом количества движения, или угловым моментом, и обозначаться буквой L

Хотя во всех наших рассмотрениях мы не принимали в расчет теорию относительности, тем не менее второе выражение для L верно и при учете ее. Итак, мы нашли, что у обычного импульса также существует вращательный аналог — угловой момент, который связан с компонентами импульса точно так же, как и момент силы связан с компонентами силы! Так что если мы хотим вычислить момент количества движения относительно какой-то оси, то должны взять тангенциальную составляющую импульса и умножить ее на радиус. Другими словами, угловой момент показывает, насколько быстро движется частица вокруг какого-то центра, ведь он учитывает только тангенциальную часть импульса. Более того, чем дальше от центра удалена линия, по которой направлен импульс, тем больше будет угловой момент. Точно так же, поскольку геометрия в этом случае та же, что и в случае момента силы, существует плечо импульса (оно, разумеется, не совпадает с плечом силы, действующей на частицу), которое равно расстоянию линии импульса от оси. Таким образом, угловой момент равен просто величине импульса, умноженного на его плечо. Точно так же, как и для момента силы, для углового момента мы можем написать следующие три формулы:
L=хрy-урх=rpтанг=р·Плечо импульса. (18.17)
Момент количества движения, как и момент силы, зависит от положения оси, относительно которой он вычисляется.
Прежде чем перейти к рассмотрению более чем одной частицы, применим полученные выше результаты к движению планеты вокруг Солнца. В каком направлении действует сила? Конечно, по направлению к Солнцу. А какой при этом будет момент силы? Разумеется, все зависит от того, в каком месте мы выберем ось, однако результат получится совсем простым, если в качестве точки вращения выбрать само Солнце. Поскольку момент силы равен силе, умноженной на ее плечо, или компоненте силы, перпендикулярной к радиусу r, умноженной на r, то в этом случае нет никакой тангенциальной составляющей силы, а поэтому момент силы относительно оси, проходящей через Солнце, равен нулю. Следовательно, момент количества движения должен оставаться постоянным. Давайте-ка посмотрим, что это означает. Произведение тангенциальной компоненты скорости на массу и радиус, будучи моментом количества движения, должно оставаться постоянным, потому что скорость его изменения есть момент силы, который в нашем случае равен нулю. Это означает, что остается постоянным произведение тангенциальной компоненты скорости на радиус, поскольку масса-то уж, конечно, не изменяется. Но такая величина, характеризующая движение планеты, уже вычислялась нами раньше. Предположим, что мы взяли маленький промежуток времени Dt. Какое расстояние пройдет планета при своем движении из точки Р в точку Q (фиг. 18.3)? Как велика площадь той области, которую «заметает» прямая, соединяющая планету с Солнцем? Пренебрегая площадью QQ'P, которая очень мала по сравнению с OPQ, находим, что площадь этой области равна половине основания PQ, умноженного на высоту OR. Другими словами, «заметенная» площадь равна половине произведения скорости на ее плечо. Так что скорость изменения этой площади пропорциональна моменту количества движения, который остается постоянным. Итак, мы получим, что закон Кеплера о равных площадях за равные промежутки времени является просто словесным описанием закона сохранения момента количества движения, когда моменты внешних сил отсутствуют.
§ 4. Закон сохранения момента количества движения
Посмотрим теперь, что получается в случае большого количества частиц, т. е. когда тело состоит из множества частичек со множеством сил, действующих между ними и извне. Разумеется, мы уже знаем, что момент силы, действующий на любую i-ю частицу (т. е. произведение силы, действующей на i-ю частицу, на ее плечо), равен скорости изменения момента количества движения этой частицы, а момент количества движения i-й частицы в свою очередь равен произведению импульса частицы на его плечо. Допустим теперь, что мы сложили моменты сил ti- всех частиц и назвали это полным моментом сил t. Эта величина должна быть равна скорости изменения суммы моментов количества движения всех частиц Li. Эту сумму можно принять за определение новой величины, которую мы назовем полным моментом количества движения L. Точно так же, как импульс тела равен сумме импульсов составляющих его частиц, момент количества движения тела тоже равен сумме моментов составляющих его частиц. Таким образом, скорость изменения полного момента количества движения L равна полному моменту сил

С непривычки может показаться, что полный момент сил — ужасно сложная штука. Ведь нужно учитывать все внутренние и внешние силы. Однако если мы вспомним, что по закону Ньютона силы действия и противодействия не только равны, но и (что особенно важно!) действуют по одной и той же прямой в противоположных направлениях (неважно, говорил ли об этом сам Ньютон или нет, неявно он подразумевал это), то два момента внутренних сил между двумя взаимодействующими частицами должны быть равны друг другу и направлены противоположно, поскольку для любой оси плечи их будут одинаковы. Поэтому все внутренние моменты сил взаимно сокращаются и получается замечательная теорема: скорость изменения момента количества движения относительно любой оси равна моменту внешних сил относительно этой же оси!

Итак, мы получили в руки мощную теорему о движении большого коллектива частиц, которая позволяет нам изучать общие свойства движения, не зная деталей его внутреннего механизма, Эта теорема верна для любого набора частиц, независимо от того, образуют ли они твердое тело или нет.
Особенно важным частным случаем этой теоремы является закон сохранения, момента количества движения, который гласит: если на систему частиц не действуют никакие внешние моменты сил, то ее момент количества движения остается постоянным.
Рассмотрим один очень важный частный случай набора частиц, когда они образуют твердое тело, т. е. объект, который всегда имеет определенную форму и геометрический размер и может только крутиться вокруг какой-то оси. Любая часть такого объекта в любой момент времени расположена одинаковым образом относительно других его частей. Попытаемся теперь найти полный момент количества движения твердого тела. Если масса i-й частицы его равна mi, а положение ее (xi yi,), то задача сводится к определению момента количества движения этой частицы, поскольку полный момент количества движения равен сумме моментов количества движения всех таких частиц, образующих тело. Для движущейся по окружности точки момент количества движения равен, конечно, произведению ее массы на скорость и на расстояние до оси вращения, а скорость в свою очередь равна угловой скорости, умноженной на расстояние до оси:
Li=miviri=mir2iw. (18.20)
Суммируя li для всех частиц, получаем
L=Iw, (18.21)

где

Это выражение очень похоже на формулу для импульса, который равен произведению массы на скорость. Скорость при этом заменяется на угловую скорость, а масса, как видите, заменяется на некоторую новую величину, называемую моментом инерции I. Вот что играет роль массы при вращении! Уравнения (18.21) и (18.22) говорят нам, что инерция вращения тела зависит не только от масс составляющих его частичек, но и от того, насколько далеко расположены они от оси. Так что если мы имеем два тела равной массы, но в одном из них массы расположены дальше от оси, то его инерция вращения будет больше. Это легко продемонстрировать на устройстве, изображенном на фиг. 18.4.
Фиг. 18.4. Зависимость «инерции вращения» от плеча масс.
Масса M в этом устройстве не может падать слишком быстро, потому что она должна крутить тяжелый стержень. Расположим сначала массы m около оси вращения, причем грузик M будет как-то ускоряться. Однако после того, как мы изменим момент инерции, расположив массы m гораздо дальше от оси, мы увидим, что грузик M ускоряется гораздо медленнее, чем прежде. Происходит это вследствие возрастания инертности вращения, которая составляет физический смысл момента инерции — суммы произведений всех масс на квадраты их расстояний от оси вращения.
Между массой и моментом инерции имеется существенная разница, которая проявляется удивительным образом. Дело в том, что масса объекта обычно не изменяется, тогда как момент инерции легко изменить. Представьте себе, что вы встали на стол, который может вращаться без трения, и держите в вытянутых руках гантели, а сами медленно вращаетесь. Можно легко изменить момент инерции, согнув руки; при этом наша масса останется той же самой. Когда мы проделаем все это, то закон сохранения момента количества движения будет творить чудеса, произойдет нечто удивительное. Если моменты внешних сил равны нулю, то момент количества движения равен моменту инерции I1, умноженному на угловую скорость ш1, т. е. ваш момент количества движения равен I1w1. Согнув затем руки, вы тем самым уменьшили момент инерции до величины I2. Но поскольку из-за закона сохранения момента количества движения произведение Iw должно остаться тем же самым, то I1w1 должно быть равно I2w2. Так что если вы уменьшили момент инерции, то ваша угловая скорость в результате этого должна возрасти.
Глава 19
ЦЕНТР МАСС; МОМЕНТ ИНЕРЦИИ
§ 1. Свойства центра масс
§ 2. Положение центра масс
§ 3. Вычисление момента инерции
§ 4. Кинетическая энергия вращения
§ 1. Свойства центра масс
В предыдущей главе мы установили факт существования некоторой замечательной точки, называемой центром масс. Она замечательна тем, что если на частицы, образующие тело (неважно, будет ли оно твердым или жидким, звездным скоплением или чем-то другим), действует великое множество сил (конечно, имеются в виду только внешние силы, поскольку все внутренние силы компенсируют друг друга), то результирующая сила приводит к такому ускорению этой точки, как будто в ней сосредоточена вся масса тела М. Давайте теперь обсудим свойство центра масс несколько подробнее.
Положение центра масс (сокращенно ц. м.) определяется уравнением
Это, разумеется, векторное уравнение, т. е. фактически три уравнения — по одному для каждого из трех направлений. Но мы будем рассматривать только x-направление; если вы поймете, что происходит в x-направлении, то поймете и два остальных. Что означает равенство Хц.м.=Smixi/Smi? Предположим на минуту, что тело разделено на маленькие кусочки с одинаковой массой m, причем полная масса будет равна числу таких кусочков N, умноженному на массу одного кусочка, скажем 1 г, или какую-то другую единицу. Тогда наше уравнение просто означает, что нужно взять координаты х всех кусочков, сложить их и результат разделить на число кусочков, т. е. Xц.м.=mSxi/mN=Sxi/N. Иными словами, если массы кусочков равны, то Хц. м.- будет просто средним арифметическим x-координат всех кусочков. Но предположим, что один из кусочков вдвое тяжелее, чем каждый из остальных. Тогда в нашу формулу его координата будет входить с коэффициентом 2, т. е. в суммах ее нужно учитывать дважды. Нетрудно понять, почему это происходит. Ведь тяжелый кусочек можно представить себе как бы состоящим из двух легких, таких же, как и все остальные, так что, когда мы вычисляем среднее, его координату х нужно учитывать дважды: ведь кусочков-то в этом месте два. Таким образом, Хц.м. равно просто среднему арифметическому х-координат всех масс, причем каждая координата считается некоторое число раз, пропорциональное массе, как будто она разделена на маленькие кусочки единичной массы. Исходя из этого, легко доказать, что Хц.м. должна находиться где-то между самой близкой и самой далекой частичкой. Вообще центр масс должен лежать где-то внутри многогранника, проведенного через крайние точки тела. Однако вовсе не обязательно, чтобы центр масс находился в самом теле; ведь могут быть тела, подобные окружности, например обруч, центр масс которого находится в геометрическом центре, а не на самом обруче.
Конечно, если объект симметричен, например прямоугольник, обладающий линией симметрии, то его центр масс должен лежать где-то на этой линии. Кстати, прямоугольник имеет еще одну линию симметрии и это однозначно определяет положение его центра масс. Для просто симметричного объекта центр масс должен лежать где-то на оси симметрии: ведь отрицательных х в этом случае ровно столько же, сколько и положительных.
Существует еще один очень забавный способ нахождения центра масс. Вообразите
себе тело, состоящее из двух кусков А и В (фиг, 19.1).

Фиг. 19.1. Центр масс сложного тела лежит на линии, соединяющей центры масс двух составляющих его частей.
Центр масс в этом случае можно найти следующим образом. Находим сначала отдельно центры масс составных частей А и В и их полные массы МА и МB . После этого находим центр масс двух точечных тел, одно из которых имеет массу МА и расположено в центре масс части А, а другое — массу МB и расположено в центре масс части В, Полученная точка и будет центром масс всего тела. Другими словами, если нам известны центры масс всех частей сложного тела, то, чтобы найти его центр масс, не нужно повторять все сначала, а достаточно просто найти центр масс системы точечных тел с массами, равными массам каждой из частей и расположенными в их центрах масс. Посмотрим, как это получается. Пусть мы хотим определить центр масс сложного тела, одни из частиц которого принадлежат части А, а другие — части В. При этом мы можем разбить полную сумму Smixi на сумму по части А, т. е. SAmixi и сумму по части В, т. е. SBmixi. Если бы мы находили центр масс только части А, то нам потребовалась бы первая из этих сумм, которая, как вы знаете, равна МАХА, т. е. полной массе части А на x-координату ее центра масс: это просто следствие теоремы о центре масс, примененной к части A. То же самое можно сказать и о части В. Сумма SBmixi должна быть равна МВХВ. Сложив эти два результата, мы, конечно, должны получить MX, т. е.
МХц.м.=Smixi+Smixi=МАХА+МВХВ. (19.2)
Полная же масса М, очевидно, равна МА+МB, так что выражение (19.2) представляет собой не что иное, как определение центра масс двух точек, одна из которых имеет массу МА и координату ХА, а другая — массу МB и координату ХB.
Теорема о движении центра масс интересна не только сама по себе, она еще играет очень важную роль в развитии нашего понимания физики. Если мы предположим, что законы Ньютона верны только для маленьких частей, составляющих большое тело, то эта теорема показывает, что они верны также и для большого тела. Мы можем не знать его детального строения и нам известны лишь общая масса и полная сила, действующая на него. Другими словами, законы Ньютона имеют ту особенность, что если они справедливы в малом масштабе, то справедливы и в большом. Нет никакой нужды рассматривать футбольный мяч как ужасно сложную вещь, состоящую из мириада взаимодействующих частиц, а достаточно изучить только движение его центра масс под действием внешней силы F, чтобы получить F=ma, где а — ускорение центра масс, а m — полная масса мяча. Итак, закон F=ma воспроизводит сам себя в большом масштабе. (Наверное, должно быть какое-нибудь хорошее греческое слово, которым можно было бы назвать подобные воспроизводящие себя в большом масштабе законы.)
Нетрудно, конечно, догадаться, что первый открытый человеком закон должен быть именно таким законом, воспроизводящим самого себя в большом масштабе. Почему? Да просто потому, что истинный размер фундаментальных «винтиков и колесиков» Вселенной есть атомный размер, который настолько меньше размеров окружающих нас вещей, что только сейчас начинает входить в обычную жизнь. Итак, первая открытая человеком закономерность не могла иметь отношения к размерам атомного масштаба. Если бы законы для малых частиц не воспроизводили себя в большом масштабе, то открыть их было бы не так-то легко. А что можно сказать об обратной проблеме? Должны ли законы микромира быть теми же самыми, что и для больших тел? Никакой необходимости в этом, конечно, нет.
Давайте, однако, предположим, что истинное движение атомов описывается неким странным уравнением, которое не воспроизводит себя при переходе к большему масштабу. Вместо этого оно обладает тем свойством, что при таком переходе его можно приближенно заменить каким-то выражением, которое при все большем и большем увеличении масштаба воспроизводит само себя. Это вполне может случиться, и в действительности так оно и происходит. Законы Ньютона являются как бы «кончиком хвоста» атомных законов, продолженных до очень больших размеров. Истинные законы движения частиц очень малых размеров весьма специфичны, но если мы возьмем большое число частиц и скомбинируем законы их движения, то приближенно, и только приближенно, получим законы Ньютона. После этого законы Ньютона позволяют нам двигаться ко все большим размерам, оставаясь при этом теми же самыми законами. В сущности, при переходе ко все большим и большим размерам они все точнее и точнее описывают природу. Так что факт самовоспроизводимости законов Ньютона — отнюдь не фундаментальное свойство природы, а важная историческая особенность.
Основываясь на своих первых наблюдениях, мы никоим образом не смогли бы открыть фундаментальные атомные законы, поскольку наблюдения эти были слишком грубыми. Действительно, фундаментальные атомные законы, которые мы называем квантовой механикой, так сильно отличаются от законов Ньютона, что понять их не просто. Ведь у нас есть только опыт обращения с телами больших размеров, а крохотные атомы ведут себя совершенно невиданным для таких тел образом. Мы не можем сказать: «Электроны в атомах напоминают планеты, крутящиеся вокруг Солнца», или что-то в этом роде. Они не похожи ни на что известное нам, ибо мы не видим ничего похожего на них. Если мы применяем квантовую механику ко все большим и большим объектам, то законы поведения такого коллектива атомов не воспроизводят поведения одного атома, а дают новый закон — закон Ньютона, который уже воспроизводит сам себя, начиная с объектов весом в 1 миллионную микрограмма, содержащих еще миллиарды и миллиарды атомов, и вплоть до тел величиной с Землю и даже еще больших.
Вернемся, однако, к центру масс. Часто его называют центром тяжести, так как во многих случаях для силы тяготения можно провести точно такие же рассуждения, как и для масс. Если размеры достаточно малы, то силу тяжести можно считать не только пропорциональной массе, но и направленной всюду параллельно некоторой фиксированной линии.
Возьмем тело, в котором сила тяжести действует на каждую из составляющих его частей, a mi — масса одной из этих частей. Действующая на нее сила тяжести будет тогда равна произведению mi на g. Возникает вопрос: в какой точке нужно приложить одну-единственную силу, чтобы сбалансировать притяжение всего тела так, чтобы оно (если это твердое тело) не вращалось? Ответ: сила должна проходить через центр масс. Доказывается это следующим образом. Чтобы тело не вращалось, сумма моментов всех сил должна быть равна нулю, ибо если нет момента сил, то нет и изменения момента количества движения, а поэтому нет и вращения. Таким образом, мы должны подсчитать сумму всех моментов, действующих на все частицы, и посмотреть, какой получится полный момент относительно любой данной оси: он должен быть равен нулю, если ось проходит через центр масс. Направив ось х горизонтально, а ось у вертикально, мы найдем, что моменты сил равны силам, направленным вниз, умноженным на плечо х (т. е. сила на плечо относительно той оси, для которой измеряется момент силы). Полный же момент равен сумме
t=Smigxi=gSmixi. (19.3)
Чтобы полный момент отсутствовал, сумма Smixi должна быть равна нулю. Но эта сумма равна MX — полной массе, умноженной на расстояние от оси х до центра масс. Итак, это расстояние должно быть равно нулю.
Разумеется, мы провели проверку только для x-направления, однако если мы действительно взяли центр масс, то тело должно быть уравновешено в любом положении, поэтому, повернув его на 90°, мы вместо оси х получим ось у. Другими словами, если держать тело за центр масс, то параллельное гравитационное поле не дает никакого момента сил. Если же объект настолько велик, что становится существенной непараллельность сил притяжения, то точку, в которой должна быть приложена уравновешивающая сила, описать не просто: она несколько отклоняется от центра масс. Вот почему нужно помнить, что центр масс и центр тяжести — разные вещи. Тот факт, что тело, поддерживаемое точно за центр масс, уравновешено в любом положении, имеет еще одно интересное следствие. Если вместо гравитационных сил взять инерционные псевдосилы, возникающие вследствие ускорения, то, чтобы найти точку, уцепившись за которую мы уравновесим все моменты этих сил, можно использовать ту же самую математическую процедуру. Предположим, что мы заключили тело внутрь ящика, который ускоряется вместе со всем его содержимым. Тогда, с точки зрения наблюдателя, сидящего в этом ящике, на тело вследствие инерции будет действовать некая эффективная сила. Иначе говоря, чтобы заставить тело двигаться вместе с ящиком, нужно подталкивать и ускорять его. Эта сила «уравновешивается силой инерции», которая равна массе тела, умноженной на ускорение ящика. Наблюдателю в ящике будет казаться, будто тело находится в однородном гравитационном поле, величина g которого равна ускорению ящика а. Таким образом, инерционные силы, возникающие вследствие ускорения тела, не имеют момента относительно центра масс.
Этот факт имеет очень интересное следствие. В инерционной системе, движущейся без ускорения, момент сил всегда равен скорости изменения момента количества движения. Однако равенство момента силы и скорости изменения момента количества движения остается справедливым даже для ускоряющегося тела, если взять ось, проходящую через центр масс. Таким образом, теорема о равенстве момента сил скорости изменения момента количества движения верна в двух случаях: 1) ось фиксирована — в инерциальной системе; 2) ось проходит через центр масс — даже когда тело ускоряется.
§ 2. Положение центра масс
Математическая техника вычисления центра масс относится к области курсов математики; там подобные задачи служат хорошими примерами по интегральному исчислению. Но, даже умея интегрировать, полезно знать некоторые трюки для вычисления положения центра масс. Один из таких трюков основан на использовании так называемой теоремы Паппа, которая работает следующим образом. Если мы возьмем какую-то замкнутую фигуру и образуем твердое тело, вращая эту фигуру в пространстве так, чтобы каждая точка двигалась перпендикулярно к плоскости фигуры, то объем образующегося при этом тела равен произведению площади фигуры на расстояние, пройденное ее центром тяжести! Разумеется, эта теорема верна и в том случае, когда плоская фигура движется по прямой линии, перпендикулярной к ее площади, однако если мы движем ее по окружности или какой-то другой кривой, то при этом получается гораздо более интересное тело. При движении по кривому пути внутренняя часть фигуры продвигается меньше, чем внешняя, и эти эффекты компенсируют друг друга. Так что если мы хотим определить центр масс плоской фигуры с однородной плотностью, то нужно помнить, что объем, образуемый вращением его относительно оси, равен расстоянию, которое проходит
Например, если нам нужно найти центр масс прямоугольного треугольника с основанием D и высотой H (фиг. 19.2), то это делается следующим образом.
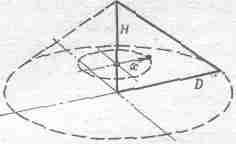
Фиг. 19.2. Прямоугольный треугольник и прямой круговой конус, образованный вращением этого треугольника.
Вообразите себе ось, проходящую вдоль H, и поверните треугольник на 360° вокруг этой оси. Это дает нам конус. Расстояние, которое проходит x-координата центра масс, равно 2pх, а площадь области, которая двигалась, т. е. площадь треугольника, равна 1/2HD. Произведение расстояния, пройденного центром масс, на площадь треугольника равно объему конуса, т. е. 1/3pD2H. Таким образом, (2pх)(1/2HD)=1/3pD2H, или x=D/3. Совершенно аналогично вращением вокруг второго катета или просто по соображениям симметрии находим, что у=Н/3. Вообще центр масс любого однородного треугольника находится в точке пересечения трех его медиан (линий, соединяющих вершину треугольника с серединой противоположной стороны), которая отстоит от основания на расстоянии, равном 1/3 длины каждой медианы.
Как это увидеть? Рассеките треугольник линиями, параллельными основанию, на множество полосок. Заметьте теперь, что медиана делит каждую полоску пополам, следовательно, центр масс должен лежать на медиане.
Возьмем теперь более сложную фигуру. Предположим, что требуется найти положение центра масс однородного полукруга, т. е. круга, разрезанного пополам. Где будет находиться центр масс в этом случае? Для полного круга центр масс расположен в геометрическом центре, но для полукруга найти его положение труднее. Пусть r — радиус круга, а x — расстояние центра масс от прямолинейной границы полукруга. Вращая его вокруг этого края как вокруг оси, мы получаем шар. При этом центр масс проходит расстояние 2pх, а площадь полукруга равна 1/2pr2 (половине площади круга). Так как объем шара равен, конечно, 4pr3/3, то отсюда находим


или
Существует еще другая теорема Паппа, которая фактически является частным случаем сформулированной выше теоремы, а потому тоже справедлива. Предположим, что вместо твердого полукруга мы взяли полуокружность, например кусок проволоки в виде полуокружности с однородной плотностью, и хотим найти ее центр масс. Оказывается, что площадь, которая «заметается» плоской кривой при ее движении, аналогичном вышеописанному, равна расстоянию, пройденному центром масс, умноженному на длину этой кривой. (Кривую можно рассматривать как очень узкую полоску и применять к ней предыдущую теорему.)
§ 3. Вычисление момента инерции
Рассмотрим теперь проблему определения момента инерции различных тел. Общая формула для нахождения момента инерции объекта относительно оси z имеет вид

Иными словами, нужно сложить все массы, умножив каждую из них на квадрат ее расстояния до оси (z2i+y2i). Заметьте, что это верно даже для трехмерного тела, несмотря на то, что расстояние имеет такой «двумерный вид». Впрочем, в большинстве случаев мы будем ограничиваться двумерными телами.
В качестве простого примера рассмотрим стержень, вращающийся относительно оси, проходящей через его конец и перпендикулярной к нему (фиг. 19.3).
Фиг. 19.3. Прямой стержень, вращающийся вокруг оси, проходящей через один из его концов.

Нам нужно просуммировать теперь все массы, умноженные на квадраты расстояния х (в этом случав все у — нулевые). Под суммой, разумеется, я имею в виду интеграл от x2, умноженный на «элементики» массы. Если мы разделим стержень на кусочки длиной dx, то соответствующий элемент массы будет пропорционален dx, а если бы dx составляло длину всего стержня, то его масса была бы равна М. Поэтому
Размерность момента инерции всегда равна массе, умноженной на квадрат длины, так что единственная существенная величина, которую мы вычислили, это множитель 1/3.
А чему будет равен момент инерции I, если ось вращения проходит через середину стержня? Чтобы найти его, нам снова нужно взять интеграл, но уже в пределах от -1/2L до +1/2L. Заметим, однако, одну особенность этого случая. Такой стержень с проходящей через центр осью можно представлять себе как два стержня с осью, проходящей через конец, причем масса каждого из них равна М/2, а длина равна L/2. Моменты инерции двух таких стержней равны друг другу и вычисляются по формуле (19.5). Поэтому момент инерции всего стержня равен

Таким образом, стержень гораздо легче крутить за середину, чем за конец.
Можно, конечно, продолжить вычисление моментов инерции других интересующих нас тел. Но поскольку такие расчеты требуют большого опыта в вычислении интегралов (что очень важно само по себе), они как таковые не представляют для нас большого интереса. Впрочем, здесь имеются некоторые очень интересные и полезные теоремы. Пусть имеется какое-то тело и мы хотим узнать его момент инерции относительно какой-то оси. Это означает, что мы хотим найти его инертность при вращении вокруг этой оси. Если мы будем двигать тело за стержень, подпирающий его центр масс так, чтобы оно не поворачивалось при вращении вокруг оси (в этом случае на него не действуют никакие моменты сил инерции, поэтому тело не будет поворачиваться, когда мы начнем двигать его), то для того, чтобы повернуть его, понадобится точно такая же сила, как если бы вся масса была сосредоточена в центре масс и
момент инерции был бы просто равен I1=MR2ц.м., где Rц.м.— расстояние от центра масс до оси вращения. Однако формула эта, разумеется, неверна. Она не дает правильного момента инерции тела. Ведь в действительности при повороте тело вращается. Крутится не только центр масс (что давало бы величину I1), само тело тоже должно поворачиваться относительно центра масс. Таким образом, к моменту инерции I1 нужно добавить Iц — момент инерции относительно центра масс. Правильный ответ состоит в том, что момент инерции относительно любой оси равен
I=Iц+МR2ц.м. (19-7)
Эта теорема называется теоремой о параллельном переносе оси. Доказывается она очень легко. Момент инерции относительно любой оси равен сумме масс, умноженных на сумму квадратов х и у, т. е. I=Smi(x2i+y2i). Мы сейчас сосредоточим наше внимание на х, однако все в точности можно повторить и для у. Пусть координата х есть расстояние данной частной точки от начала координат; посмотрим, однако, как все изменится, если мы будем измерять расстояние х' от центра масс вместо х от начала координат. Чтобы это выяснить, мы должны написать
xi=x'i+Xц.м..
Возводя это выражение в квадрат, находим
x2i=x'2i+2Xц.мх'i+Х2ц. м..
Что получится, если умножить его на mi и просуммировать по всем i? Вынося постоянные величины за знак суммирования, находим
Ix=Smixi+2Xц. м. Smixi+X2ц. м. Smi .
Третью сумму подсчитать легко; это просто МХ2ц..м.. Второй член состоит из двух сомножителей, один из которых Smixi; он равен x'-координате центра масс. Но это должно быть равно нулю, ведь х' отсчитывается от центра масс, а в этой системе координат среднее положение всех частиц, взвешенное их массами, равно нулю. Первый же член, очевидно, представляет собой часть х от Iц. Таким образом, мы и приходим к формуле (19.7).
Давайте проверим формулу (19.7) на одном примере. Просто проверим, будет ли она применима для стержня. Мы уже нашли, что момент инерции стержня относительно его конца должен быть равен ML2/3. А центр масс стержня, разумеется, находится на расстоянии L/2. Таким образом, мы должны получить, что МL2/3=МL2/12+М(L/2)2. Так как одна четвертая + одна двенадцатая = одной третьей, то мы не сделали никакой грубой ошибки.
Кстати, чтобы найти момент инерции (19.5), вовсе не обязательно вычислять интеграл. Можно просто предположить, что он равен величине ML2, умноженной на некоторый неизвестный коэффициент g. После этого можно использовать рассуждения о двух половинках и для момента инерции (19.6) получить коэффициент 1/4g. Используя теперь теорему о параллельном переносе оси, докажем, что g=1/4g+1/4, откуда g=1/3. Всегда можно найти какой-нибудь окольный путь!
При применении теоремы о параллельных осях важно помнить, что ось Iц должна быть параллельна оси, относительно которой мы хотим вычислять момент инерции.

Стоит, пожалуй, упомянуть еще об одном свойстве, которое часто бывает очень полезно при нахождении момента инерции некоторых типов тел. Оно состоит в следующем: если у нас есть плоская фигура и тройка координатных осей с началом координат, расположенным в этой плоскости, и осью r, направленной перпендикулярно к ней, то момент инерции этой фигуры относительно оси z равен сумме моментов инерции относительно осей х и у. Доказывается это совсем просто. Заметим, что

(поскольку все zi=0). Аналогично,
Момент инерции однородной прямоугольной пластинки, например с массой М, шириной w и длиной L относительно оси, перпендикулярной к ней и проходящей через ее центр, равен просто
поскольку момент инерции относительно оси, лежащей в плоскости пластинки и параллельной ее длине, равен Mw2/12, т. е. точно такой же, как и для стержня длиной w, а момент инерции относительно другой оси в той же плоскости равен ML2/12, такой же, как и для стержня длиной L.
Итак, перечислим свойства момента инерции относительно данной оси, которую мы назовем осью z:

1. Момент инерции равен
2. Если предмет состоит из нескольких частей, причем момент инерции каждой из них известен, то полный момент инерции равен сумме моментов инерции этих частей.
3. Момент инерции относительно любой данной оси равен моменту инерции относительно параллельной оси, проходящей через центр масс, плюс произведение полной массы на квадрат расстояния данной оси от центра масс.
4. Момент инерции плоской фигуры относительно оси, перпендикулярной к ее плоскости, равен сумме моментов инерции относительно любых двух других взаимно перпендикулярных осей, лежащих в плоскости фигуры и пересекающихся с перпендикулярной осью.

Таблица 19,1 · простые примеры моментов инерции
В табл. 19.1 приведены моменты инерции некоторых элементарных фигур, имеющих однородную плотность масс, а
табл. 19.2 — моменты инерции некоторых фигур, которые могут быть получены из табл. 19.1 с использованием пере
численных выше свойств.

Таблица 19.2 · моменты инерции, полученные из табл. 19.1
§ 4. Кинетическая энергия вращения

Продолжим изучение динамики вращения. При обсуждении аналогии между линейным и угловым движением в гл. 18 мы использовали теорему о работе, но ничего не говорили о кинетической энергии. Какова будет кинетическая энергия твердого тела, вращающегося вокруг некоторой оси с угловой скоростью w? Используя нашу аналогию, можно немедленно угадать правильный ответ. Момент инерции соответствует массе, угловая скорость соответствует обычной скорости, так что кинетическая энергия должна быть равна 1/2 Iw2. Так оно и есть на самом деле, и сейчас мы покажем это. Предположим, что тело вращается вокруг некоторой оси, так что каждая точка движется со скоростью wr,-, где ri — расстояние от данной точки до оси. Если масса этой точки равна mi, то полная кинетическая энергия всего тела равна просто сумме кинетических энергий всех частиц

а поскольку w — постоянная, одна и та же для всех точек, то
В конце гл. 18 мы отмечали, что существуют очень интересные явления, связанные с вращением не абсолютно твердого тела, способного изменять свой момент инерции. Именно, в примере с вращающимся столом у нас был момент инерции I1 и угловая скорость w1 при вытянутых руках. Согнув руки, мы изменили момент инерции до I2, а угловую скорость — до w2. Так как у нас нет никаких моментов сил относительно оси вращения стола, то момент количества движения должен остаться постоянным. Это означает, что I1w1=I2w2. А что можно сказать об энергии? Это очень интересный вопрос. Согнув руки, мы начинаем вращаться быстрее, но момент инерции при этом уменьшается и может показаться, что кинетическая энергия должна остаться той же самой. Это, однако, неверно, потому что в действительности сохраняется Iw, а не Iw2. Сравним теперь кинетические энергии в начале и в конце. В начале кинетическая энергия равна 1/2/Iw21=1/2Lw1, где L=I1w1=I2w2— момент количества движения. Точно таким же образом кинетическая энергия в конце равна Т=1/2Lw2, а поскольку w2>w1, то кинетическая энергия в конце оказывается большей, чем в начале. Итак, вначале, когда руки были вытянуты, мы вращались с какой-то кинетической энергией, затем, согнув руки, мы стали вращаться быстрее и наша кинетическая энергия возросла. А как быть с законом сохранения энергии? Ведь должен же кто-то произвести работу, чтобы увеличить энергию? Это сделали мы сами! Но когда, в какой момент? Когда мы держим гантели горизонтально, то никакой работы не производим. Выпрямляя руки в стороны и сгибая их, мы тоже не можем произвести никакой работы. Это, однако, верно только, пока нет никакого вращения! При вращении же на гантели действует центробежная сила. Они стремятся вырваться из наших рук, так что, сгибая во время вращения руки, мы преодолеваем противодействие центробежной силы. Работа, которая на это затрачивается, и составляет разницу в кинетических энергиях вращения. Вот откуда берется этот добавок.
Существует еще одно очень интересное явление, которое мы рассмотрим только описательно, чтобы просто иметь о нем представление. Хотя изучение этого явления требует несколько большего опыта, но упомянуть о нем стоит, ибо оно очень любопытно и дает много интересных эффектов.
Возьмем снова эксперимент с вращающимся столиком. Рассмотрим отдельно тело и руки, с точки зрения человека, вращающегося на столике. Согнув руки с гантелями, мы стали вращаться быстрее, но заметьте, что тело при этом не изменило своего момента инерции; тем не менее оно стало вращаться быстрее, чем прежде. Если бы мы провели вокруг тела окружность и рассмотрели только предметы внутри этой окружности, то их момент количества движения изменился бы; они закрутились бы быстрее. Следовательно, когда мы сгибаем руки, на тело должен действовать момент силы. Однако центробежная сала не может дать никакого момента, так как она направлена по радиусу. Это говорит о том, что среди сил, возникающих во вращающейся системе, центробежная сила не одинока: есть еще и другая сила. Эта другая сила носит название кориолисовой силы, или силы Кориолиса. Она обладает очень странным свойством: оказывается, что если мы во вращающейся системе двигаем какой-то предмет, то она толкает его вбок. Как и центробежная сила, эта сила кажущаяся. Но если мы живем во вращающейся системе и хотим что-то двигать по радиусу, то для этого мы должны тянуть его несколько вбок. Именно эта «боковая» сила создает момент, который раскручивает наше тело.
Перейдем теперь к формулам и покажем, как кориолисова сила работает на практике. Пусть Мик сидит на карусели, которая кажется ему неподвижной. С точки зрения Джо, который стоит на земле и знает истинные законы механики, карусель крутится. Предположим, что мы провели радиальную прямую на карусели и пусть Мик двигает прямо по этой линии какую-то массу. Я хочу показать, что для того, чтобы все было так, как мы описали, необходима боковая сила. Это можно увидеть, обратив внимание на момент количества движения вращающейся массы. Она крутится все время с одной и той же угловой скоростью w, поэтому ее момент количества движения равен
L=mvтавгr=mwr·г=mwг2.

Если масса расположена близко к центру, то он сравнительно мал, но если мы передвигаем ее в новое положение и если мы увеличиваем r, то масса m приобретает больший момент количества движения, т. е. во время движения по радиусу на нее должен действовать некоторый момент силы. (Чтобы на карусели двигаться по радиусу, нужно наклониться и толкаться вбок. Попробуйте как-нибудь сами проделать это.) Поскольку момент силы равен скорости изменения L во время движения массы m по радиусу, то
где через fk обозначена сила Кориолиса. В действительности мы хотели узнать, какую боковую силу должен прилагать Мик, чтобы двигать массу m со скоростью vr=dr/dt. Как видите, она равна FK=т/r=2mwvr.
Теперь, имея формулу для кориолисовой силы, давайте рассмотрим несколько более подробно всю картину в целом. Как можно понять причину возникновения этой силы из элементарных соображений? Заметьте, что кориолисова сила не зависит от расстояния до оси и поэтому действует даже на оси! Оказывается, что легче всего понять именно силу, действующую на оси вращения. Для этого нужно просто посмотреть на все происходящее из инерциальной системы Джо, который стоит на земле. На фиг. 19.4 показаны три последовательных положения массы m, которая при t=0 проходит через ось.

Фиг. 19.4. Три последовательных положения движущейся по радиусу точки вращающегося столика.
Из-за вращения карусели масса, как мы видим, движется не по прямой линии, а по некоторому кривому пути, касающемуся диаметра в точке r=0. Но для того чтобы она двигалась по кривому пути, должна действовать ускоряющая сила. Это и есть кориолисова сила.
Однако с кориолисовой силой мы встречаемся не только в подобных ситуациях. Можно показать, что если предмет движется с постоянной скоростью по краю диска, то на него тоже действует кориолисова сила. Почему? Мик видит предмет движущимся со скоростью vм, а Джо видит его движущимся по окружности со скоростью vд=vм+wr, поскольку предмет вдобавок переносится каруселью. Как мы уже знаем, действующая в этом случае сила будет, в сущности, полностью центробежной силой скорости vд, равной тv2Д/r. Но, с точки зрения Мика, она должна состоять из трех частей. Все это можно записать в следующем виде:

Итак, Fr — это сила, которую измеряет Мик. Попытаемся понять, откуда что берется. Может ли Мик признать первый член? «Конечно,— сказал бы он,— даже если бы я не вращался, то такая центробежная сила должна возникнуть, если побежать по кругу со скоростью vм». Итак, это просто центробежная сила, появления которой Мик ожидает и которая не имеет ничего общего с вращением карусели. Вдобавок Мик думает, что должна быть еще одна центробежная сила, действующая даже на неподвижные предметы на его карусели. Это дает третий член. Однако в дополнение к ним существует еще один член — второй, который опять равен 2 mwvм. Раньше, при радиальной скорости, кориолисова сила fk была тангенциальна. Теперь же, при тангенциальной скорости, она радиальна. В самом деле, одно выражение отличается от другого только знаком. Сила всегда имеет одно и то же направление по отношению к скорости независимо от того, куда направлена скорость. Она действует под прямым углом к скорости и равна по величине 2mwv.
Глава 20
ВРАЩЕНИЕ В ПРОСТРАНСТВЕ
§ 1. Моменты сил в трехмерном пространстве
§ 2. Уравнения вращения в векторном виде
§ 3. Гироскоп
§ 4. Момент количества движения твердого тел
§ 1. Моменты сил в трехмерном пространстве
В этой главе мы рассмотрим одно из наиболее замечательных и забавных следствий законов механики — поведение крутящегося колеса. Для этого нам прежде всего нужно расширить математическое описание вращения, понятие момента количества движения, момента силы и т. д. на трехмерное пространство. Однако мы не будем использовать эти уравнения во всей их общности и изучать все следствия, ибо это займет многие годы, а нас ждут другие разделы, к которым мы вскоре должны перейти. В вводном курсе можно остановиться только на основных законах и их приложениях к весьма ограниченному числу особенно интересных случаев.
Прежде всего хочу отметить, что для вращения в трех измерениях твердого тела или какого-то иного объекта остается верным все, что мы получили для двух измерений. Иначе говоря, xFy-yFx так и остается моментом силы «в плоскости ху», или моментом силы «относительно оси z». Остается справедливым также, что этот момент силы равен скорости изменения величины хрy-урх; если вы вспомните вывод уравнения (18.15) из законов Ньютона, то увидите, что фактически мы не использовали того обстоятельства, что движение плоское, и просто дифференцировали величину хру-урх и получали xFy-yFx, так что эта теорема остается верной. Величину хру-урх мы называли моментом количества движения в плоскости ху, или моментом количества движения относительно оси z. Кроме плоскости ху, можно использовать другие пары осей и получить другие уравнения. Возьмем, например, плоскость yz. Уже из симметрии ясно, что если мы просто подставим у вместо х, a z вместо у, то для момента силы получим выражение yFz-zFy и ypz-zpy будет угловым моментом в этой плоскости. Разумеется, можно еще взять и плоскость zx и получить для нее
zFx-xFz=d/dt(zpx-xpz).
Совершенно ясно, что для движения одной частицы мы получаем и три уравнения для трех плоскостей. Более того, если мы складывали такие величины, как хру—урх, для многих частиц и называли это полным угловым моментом, то теперь у нас есть три сорта подобных выражений для трех плоскостей: ху, yz и zx, а сделав то же самое с моментами сил, мы можем также говорить и о полных моментах сил в этих плоскостях. Таким образом, появляются законы о том, что внешний момент сил в некоторой плоскости равен скорости изменения углового момента в той же плоскости. Это просто обобщение того, что писалось для двух измерений.
Однако теперь можно сказать: «Но ведь есть еще и другие плоскости. Разве нельзя в конце концов взять плоскость под каким-то углом и вычислять действующие в ней моменты сил. Для каждого такого случая нужно писать другие системы уравнений, так что в результате их наберется масса!» Здесь следует отметить очень интересное обстоятельство. Оказывается, что если мы в комбинации x'Fy'-y'Fx' для «косой» плоскости выразим величины x', Fy' и т. д. через их компоненты, то результат можно записать в виде некоторой комбинации трех моментов в плоскостях ху, yz и zx. В этом нет ничего нового. Другими словами, если нам известны три момента сил в плоскостях ху, yz и zx, то момент сил в любой другой плоскости, как и угловой момент, может быть записан в виде их комбинации: скажем, 6% одного, 92% другого и т. д. Этим свойством мы сейчас и займемся.
Пусть Джо для своих координатных осей х, у, z определял все моменты сил и все угловые моменты во всех плоскостях. Однако Мик направил свои оси х', у', z' по-другому. Чтобы немного облегчить задачу, предположим, что повернуты только оси x и y. Мик выбрал другие оси х' и у', а его ось z осталась той же самой. Это означает, что плоскости yz и zx у него новые, а поэтому моменты сил и угловые моменты у него тоже окажутся новыми. Например, его момент сил в плоскости х'у' окажется равным

x'Fy'-y'Fx' и т. д. Следующая задача — найти связь между новыми и старыми моментами сил. Ее вполне можно решить, установив связь одного набора осей с другим. «Да это же напоминает то, что мы делали с векторами»,— скажете вы. Действительно, я собираюсь делать в точности то же самое. «А не вектор ли он, этот момент сил?» — спросите вы. Действительно, он — вектор, однако этого нельзя сказать просто так, без всякого математического анализа. Так что следующим этапом должен быть анализ. Однако мы не будем подробно обсуждать каждый шаг, а только покажем, как это все работает. Моменты сил, вычисленные Джо, равны

В этом месте мы сделаем отступление и заметим, что в подобных случаях, если оси координат выбраны неправильно, для некоторых величин получается неверный знак. Почему бы не написать tyz=zFy-yFz? Этот вопрос связан с тем обстоятельством, что система координат может быть либо «левая», либо «правая». Однако выбрав (произвольно) знак, скажем, у txy , можно всегда определить правильное выражение для остальных двух величин путем замены по какой-либо из двух схем:

Теперь Мик подсчитывает моменты сил в своей системе.
Пусть одна система координат повернута на угол q по отношению к другой, так что ось z осталась той же самой. (Угол q ничего не имеет общего с вращением объекта или с чем-то происходящим внутри системы координат. Это просто связь между осями, используемыми одним человеком, и осями, используемыми другим. Мы предполагаем, что он остается постоянным.) При этом координаты в двух системах связаны так:
x'=xcosq+ysinq,
y'=уcosq-хsinq, (20.3)
z'=z.

Точно таким же образом, поскольку сила является вектором, она преобразуется в новой системе координат так же, как х, у и z. Просто, по определению, объект называется вектором тогда и только тогда, когда различные его компоненты преобразуются как х, у и z
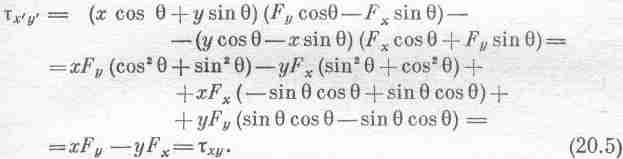
Теперь можно определить, как преобразуется момент силы. Для этого в уравнение (20.2) нужно просто подставить вместо х', у' и z' выражение (20.3), а для Fx' , Fy', и Fz'-— выражение (20.4). В результате для tx'y' получается длинный ряд членов, но оказывается (и на первый взгляд это удивительно), что все сводится просто к выражению xFy-yFx, которое, как известно, является моментом силы в плоскости ху:

Результат совершенно ясен: ведь мы только повернули оси, лежащие в плоскости ху, при этом момент относительно оси z в этой плоскости не отличается от прежнего: ведь плоскость-то осталась той же самой! Более интересно выражение для tV'Z' . Здесь уже мы имеем дело с новой плоскостью. Если теперь повторить то же самое с плоскостью y'z', то получим
И наконец, для плоскости z'x'


Мы хотели найти правило для определения момента сил в новой системе через момент сил в старой и нашли его. Как можно запомнить это правило? Если внимательно посмотреть на уравнения (20.5)—(20.7), то нетрудно увидеть, что между ними и уравнениями для х, у и z существует тесная связь. Если каким-то образом мы бы могли назвать tху z-компонентой чего-то, скажем z-компонентой вектора t, то все было бы в порядке: уравнение (20.5) мы бы понимали как преобразование вектора t, ибо z-компонента его, как это и должно быть, оставалась бы неизменной. Аналогично, если связать плоскость yz с x-компонентой новоиспеченного вектора, а плоскость zx с у-компонентой, то закон преобразования будет выглядеть так:
что в точности соответствует закону преобразования векторов.
Мы, следовательно, доказали, что комбинацию xFy-yFx можно отождествить с тем, что обычно называется z-компонентой некоторого искусственно введенного вектора. Хотя момент сил является своего рода «кручением» в плоскости и, казалось бы, не имеет векторного характера, математически он все-таки ведет себя как вектор. Этот вектор направлен под прямым углом к плоскости кручения, а его длина пропорциональна силе кручения. Три компоненты такой величины будут преобразовываться при вращении как самый настоящий вектор.
Итак, мы представляем момент силы в виде вектора. Согласно правилу, с каждой плоскостью, в которой он действует, мы связываем прямую, перпендикулярную к этой плоскости. Однако перпендикулярность к плоскости оставляет неопределенный знак вектора. Чтобы определить его, необходимо еще одно дополнительное правило, которое говорило бы нам, что если момент силы действует определенным образом в плоскости ху, то соответствующий ему вектор направлен «вверх» по оси z. Это означает, что предварительно кто-то должен сказать нам, где «право», а где «лево». Предположим, что система координат xyz правосторонняя; тогда правило должно быть таким: если представить себе кручение как ввертывание болта с правовинтовой резьбой, то направление вектора, связанного с этим кручением, определяется поступательным движением болта.
Почему же момент можно отождествить с вектором? А это счастливая случайность: с каждой плоскостью можно связать только одну ось и, следовательно, с моментом можно связать только один вектор. Это свойство — особенность трехмерного пространства. В двумерном пространстве, например, момент — самый обычный скаляр, не нуждающийся в направлении. В трехмерном пространстве он — вектор. Если бы у нас было четыре измерения, то возникло бы большое затруднение, ибо (если, например, в качестве четвертого измерения взять время) дополнительно к трем плоскостям xy, yz и zx появятся также плоскости tx, ty и tz. Всего, следовательно, получается шесть плоскостей, а представить шесть величин в виде одного четырехмерного вектора невозможно.
Однако нам еще долго предстоит оставаться в трехмерном пространстве, поэтому стоит отметить, что в предыдущих математических рассмотрениях совершенно не существенно то, что х — координата, a F — сила, а существен только закон преобразования векторов. Поэтому не будет никакой разницы, если мы вместо координаты х подставим x-компоненту любого другого вектора. Иначе говоря, если мы хотим вычислить величину axby-aybx, где а и b — векторы, и назвать ее z-компонентой некоторой новой величины cz, то эта величина будет вектором с. Было бы хорошо для такой связи трех компонент нового вектора с с векторами а и b придумать какое-то математическое обозначение. Для такой связи пользуются обозначением: c=aXb. Таким образом, в дополнение к обычному скалярному произведению в векторном анализе мы получили произведение нового сорта, так называемое векторное произведение. Итак, запись c=aXb это то же самое, что
cx=aybz-агbу,
cy=azbx-axbz, (20,9)
сг=ахbу -ауbх.
Если переменить порядок векторов а и b, т. е. вместо aXb взять bXa, то знак вектора с при этом изменится, ибо cz равно bхау-bуах. Векторное произведение поэтому не похоже на обычное умножение, для которого аb=bа. Для векторного произведения bXa=-aXb. Отсюда немедленно следует, что если а=b, то векторное произведение равно нулю, т. е. аXа=0.
Векторное произведение очень хорошо передает свойство вращения, поэтому важно понимать геометрическую связь векторов а, b и с. Связь между компонентами определяется уравнениями (20.9), исходя из которых можно получить следующие геометрические соотношения. Во-первых, вектор с перпендикулярен как к вектору а, так и к вектору b. (Попробуйте вычислить сXа и вы увидите, что в результате получится нуль.) Во-вторых, величина вектора с оказывается равной произведению абсолютных величин векторов b и а, умноженному на синус угла между ними. А куда направлен вектор с? Вообразите, что мы доворачиваем вектор а до вектора b в направлении угла, меньшего 180°; если крутить в ту же сторону болт с право-винтовой резьбой, то он должен двигаться в направлении вектора с. То, что мы берем правовинтовой болт, а не левовинтовой,— простая договоренность, которая постоянно напоминает нам, что в отличие от настоящих, «честных» векторов а и b вектор нового типа аXb по своему характеру слегка отличается от них, ибо строится он искусственно, по особому рецепту. У обычных векторов а и b, кроме того, есть специальное название: мы называем их полярными векторами. Примерами таких векторов служат координата r, сила F, импульс р, скорость v, электрическое поле Е и т. д. Все это обычные полярные векторы. Векторы же, содержащие одно векторное произведение обычных векторов, называются аксиальными векторами, или псевдовекторами. Примерами псевдовекторов, несомненно, могут служить момент силы t и момент импульса L. Кроме того, оказывается, что угловая скорость w, как и магнитное поле В, тоже псевдовектор.
Чтобы расширить наши сведения о математических свойствах векторов, нужно знать все правила их умножения, как векторного, так и скалярного. В настоящий момент нам нужны лишь очень немногие из них, однако в целях полноты мы выпишем все правила с участием векторного произведения. Впоследствии мы будем ими пользоваться. Эти правила таковы:
а) aX (b+c)=aXb+aXc,
б) (aa)Xb=a (aXb),
в) a· (bXc)=(aXb)·c, (20.10)
г) aX (bXc)=b(a·c)—c(a·b),
д) аXа=0,
е) а·(aXb)=0.
§ 2. Уравнения вращения в векторном виде
Возникает вопрос: можно ли с помощью векторного произведения записать какое-нибудь уравнение физики? Да, конечно, с его помощью записываются очень многие уравнения. Сразу же видно, например, что момент силы равен векторному произведению радиус-вектора на силу
t=rXF. (20.11)
Это просто краткая запись трех уравнений: тx=yFz-zFy и т. д. С помощью того же символа можно представить момент количества движения одной частицы в виде векторного произведения вектора расстояния от начала координат (радиус-вектора) на вектор импульса
L=rXp. (20.12)
Векторная форма динамического закона вращения в трехмерном пространстве напоминает уравнение Ньютона F=dp/dt; именно вектор момента силы равен скорости изменения со временем вектора момента количества движения
t=dL/dt. (20.13)

Если мы сложим (20.13) для многих частиц, то получим, что внешний момент сил, действующий на систему, равен скорости изменения полного момента количества движения
Еще одна теорема: если полный момент внешних сил равен нулю, то вектор полного момента количества движения системы остается постоянным. Эта теорема называется законом сохранения момента количества движения. Если на данную систему не действуют никакие моменты сил, то ее момент количества движения не изменяется.
А что можно сказать об угловой скорости? Вектор ли она? Мы уже рассматривали вращение твердого тела вокруг некоторой фиксированной оси, а теперь давайте на минуту предположим, что оно одновременно вращается вокруг двух осей. Тело может находиться, например, в коробке и вращаться там вокруг некоторой оси, а сама коробка в свою очередь вращается вокруг какой-то другой оси. Результатом же такого сложного движения будет вращение тела вокруг некоторой новой оси. Самое удивительное здесь то, что эта новая ось может быть найдена следующим образом. Если вращение в плоскости ху представить как вектор, направленный вдоль оси z, длина которого равна скорости вращения, а в виде другого вектора, направленного вдоль оси y, изобразить скорость вращения в плоскости, то, сложив их по правилу параллелограмма, получим результат, величина которого говорит о скорости вращения тела, а направление определяет плоскость вращения. Попросту говоря, угловая скорость в самом деле есть вектор, для которого скорость вращения в трех плоскостях представляет прямоугольные проекции на эти плоскости.
В качестве простого примера с использованием вектора угловой скорости подсчитаем мощность, затрачиваемую моментом сил, действующим на твердое тело. Так как мощность — это скорость изменения работы со временем, то в трехмерном пространстве она оказывается равной Р=t·w.
Все формулы, которые мы писали для плоского вращения, могут быть обобщены на три измерения. Если взять, например, твердое тело, вращающееся вокруг некоторой оси с угловой скоростью w, то можно спросить: «Чему равна скорость точки с радиус-вектором r?» В качестве упражнения попытайтесь доказать, что скорость частицы твердого тела задается выражением v=wXr, где w — угловая скорость, а r — положение частицы. Другим примером векторного произведения служит формула для кориолисовой силы, которую можно записать как FK=2mvXw. Иначе говоря, если в системе координат, вращающейся со скоростью w, частица движется со скоростью v и ми все хотим описать через величины этой вращающейся системы, то необходимо добавлять еще псевдосилу fk.
§ 3. Гироскоп
Вернемся теперь снова к закону сохранения момента количества движения. Его можно продемонстрировать с помощью быстро вращающегося колеса, или гироскопа (фиг. 20.1).

Фиг. 20.1. Быстро вращающийся гироскоп.
а — ось направлена горизонтально, момент количества движения относительно вертикальной оси равен пулю; б — ось направлена вертикально, момент количества движения относительно вертикальной оси должен остаться равным нулю; человек и стул крутятся в направлении, противоположном вращению колеса.
Если стать на крутящийся стул и держать вращающееся колесо в горизонтальном положении, то его момент количества движения будет направлен горизонтально. Момент количества движения относительно вертикальной оси нельзя изменить из-за фиксированного направления оси стула (трением пренебрегаем). Если теперь повернуть ось с колесом вертикально, то колесо приобретет момент количества движения относительно вертикальной оси. Однако система в целом (колесо, вы сами и стул) не может иметь вертикальной компоненты, поэтому вы вместе со стулом должны крутиться в направлении, обратном вращению колеса, чтобы скомпенсировать его.

Прежде всего давайте более подробно проанализируем явление, которое мы только что описали. Самое удивительное, в чем нам следует разобраться, это откуда берутся силы, раскручивающие нас вместе со стулом, когда мы поворачиваем ось гироскопа вертикально. На фиг. 20.2 показано колесо, быстро вращающееся вокруг оси у, т. е. его угловая скорость направлена по этой оси.
Фиг. 20.2. Гироскоп.
В ту же сторону направлен и момент количества движения. Предположим теперь, что мы хотим вращать колесо относительно оси х с малой угловой скоростью W; какая сила для этого требуется? Через малый промежуток времени Dt ось займет новое положение, отклонившись от горизонтального положения на угол Dq. Поскольку основная часть момента количества движения происходит от вращения колеса (медленное вращение вокруг оси х дает очень малый вклад), мы видим, что вектор момента количества движения изменяется. Каково же изменение этого вектора? Он остается тем же самым по величине, однако направление его меняется на угол Dq. Величина вектора DL поэтому равна DL=L0Dq; в результате возникает момент силы, равный скорости изменения момента количества движения t=DL/Dt=L0(Dq/Dt)=L0W. Учитывая направление различных величин, мы видим, что
t=WXL0. (20.15)
Таким образом, если W и l0 направлены горизонтально, как это показано на фигуре, то t направлен вертикально. Чтобы уравновесить такой момент, к концам оси в горизонтальном направлении должны быть приложены силы F и -F. Откуда берутся эти силы, кто их прикладывает? Да мы сами, собственными руками, когда стараемся повернуть ось колеса в вертикальное положение. Но Третий закон Ньютона требует, чтобы равные и противоположно направленные силы (и равный, но противоположно направленный момент) действовали на нас. Они и заставляют нас крутиться вокруг вертикальной оси z в противоположном направлении.
Этот результат можно обобщить на быстро вращающийся волчок. В обычном вращающемся волчке сила тяжести, действующая на его центр масс (ц.м.), создает момент относительно точки соприкосновения волчка с полом (фиг. 20.3).
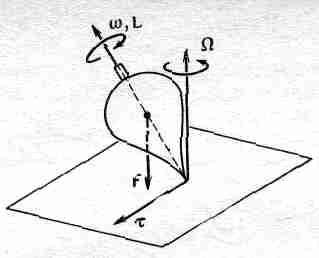
Фиг. 20.3. Быстро вращающийся волчок.
Заметьте, что направление вектора момента силы совпадает с направлением прецессии.
Этот момент действует в горизонтальном направлении и заставляет волчок прецессировать, т. е. ось его будет описывать круговой конус вокруг вертикальной оси. Если W — угловая скорость прецессии (направленная вертикально), то мы снова находим
Таким образом, если к быстро вращающемуся волчку приложить момент сил, то возникнет прецессия в направлении этого момента, т. е. под прямым углом к силам, создающим момент.
Итак, теперь мы можем утверждать, что поняли прецессию гироскопа, и математически мы действительно поняли ее. Однако вся эта математика может показаться нам в каком-то смысле «колдовством». Между прочим, по мере углубления во все более сложную физику многие простые вещи легче вывести математически, чем действительно понять их фундаментальный или простой смысл. По мере того как вы будете переходить ко все более и более современным работам по физике, то обнаружите одно странное обстоятельство: математика дает результаты, которые никто не может понять непосредственно. В качестве примера можно взять уравнение Дирака, которое получается очень просто и красиво, но понять его следствия трудновато. В нашем частном случае прецессия волчка кажется чудом, каким-то тайнодействием с прямыми углами, окружностями, крутящимися силами и правовинтовыми болтами. Но давайте все-таки попытаемся понять ее физическую сущность.
Как можно объяснить этот момент сил с помощью реально действующих сил и ускорений? Заметьте, что, когда колесо прецессирует, частицы колеса в действительности не движутся уже в одной плоскости (фиг. 20.4).

Фиг. 20.4. Движение частицы вращающегося колеса, показанного на фиг. 20.2,
При повороте оси эти частицы движутся по кривой линии.
Мы показали ранее (см. фиг. 19.4), что частица, которая пересекает ось прецессии, движется по кривому пути. Но для этого требуется какая-то боковая сила, которая возникает благодаря производимому нами давлению на ось колеса. Это давление по спицам передается частицам обода. «Постойте,— скажете вы,— а как относительно частиц на другой стороне колеса, которые движутся в обратном направлении?» Нетрудно догадаться, что действующие на них силы должны быть направлены в противоположную сторону, поэтому полная сила должна быть равна нулю. Таким образом, силы уравновешиваются, но одна из них приложена на одной стороне колеса, а другая — на другой. Эти силы можно было бы приложить непосредственно к колесу, однако из-за того, что колесо твердое, их можно приложить к оси, а через спицы они передаются на колесо.
До сих пор мы доказали, что, если колесо прецессирует, оно может скомпенсировать моменты сил, вызванные силой притяжения или какой-то другой причиной. Однако мы только показали, что прецессия есть одно из возможных решений уравнения. Другими словами, только при том условии, что действует момент и колесо запущено правильно, мы получим чистую прецессию. Но мы не доказали (и это вообще неверно), что чистая прецессия — наиболее общее движение вращающегося тела под действием момента сил. Общее движение включает, кроме того, какие-то колебания и отклонения от главной прецессии. Эти колебания называются нутацией.
Кое-кто любит говорить, что когда на гироскоп действует момент, то он поворачивается и прецессирует, что момент сил приводит к прецессии. Кажется очень странным, что, будучи запущенным, гироскоп не падает под действием силы тяжести, а движется вбок! Как это может случиться, что направленная вниз сила тяжести, которую мы хорошо знаем и чувствуем, заставляет его двигаться вбок? Ни одна из формул в мире, подобная (20.15), не скажет нам этого, потому что формула (20.15)— это особый случай, верный только тогда, когда прецессия гироскопа уже установилась. Если же говорить о деталях, то в действительности происходит следующее. Когда мы держим гироскоп за ось, так что он никак не может прецессировать (но сохраняет свое вращение), то на него не действуют никакие моменты сил, даже момент силы тяжести, поскольку своими пальцами мы компенсируем его. Но стоит только освободить ось, как в тот же момент на нее подействует момент силы тяжести. По простоте душевной каждый решит, что конец оси должен при этом падать, и он действительно начинает падать. Это можно просто видеть, если гироскоп вращается не слишком быстро.

Итак, как и ожидается, конец оси гироскопа действительно начинает падать. Но поскольку он падает, то, стало быть, он вращается и тем самым создает момент сил. Это сообщает оси гироскопа движение вокруг вертикальной оси такое же, как и при постоянной прецессии. Однако вскоре скорость начинает превышать скорость при постоянной прецессии, поэтому ось начинает подниматься вверх до прежнего уровня. В результате конец оси описывает циклоиду (кривую, которую описывает камень, застрявший в шине автомобиля). Обычно это очень быстрое, незаметное для глаз движение, к тому же оно скоро затухает благодаря трению в подшипниках, а выживает только «чистая» прецессия (фиг. 20.5).
Фиг. 20.5. Истинное движение конца оси гироскопа под действием силы тяжести тотчас же после его освобождения.
Однако чем медленнее крутится колесо, тем нутация более заметна.
После того как движение устанавливается, ось гироскопа оказывается несколько ниже, чем она была вначале. Почему? (Это более сложная деталь, и мы упоминаем о ней только для того, чтобы не оставлять у читателя впечатления, что гироскоп — это чудо. Он действительно удивительная штука, но все же не чудо.) Если мы держали ось абсолютно горизонтально, а затем внезапно отпустили ее, то с помощью уравнения прецессии мы можем установить, что ось начинает прецессировать, т. е. двигаться по кругу в горизонтальной плоскости. Но это невозможно! Хотя мы и не обращали на это внимания раньше, колесо обладает каким-то моментом инерции относительно прецессирующей оси, и если оно даже медленно вращается вокруг этой оси, то оно имеет слабый момент количества движения. Отчего это происходит? Ведь если опора идеальная (т. е. если нет никакого трения), то относительно вертикальной оси никакого момента сил не может возникнуть. Тогда каким же образом прецессия все же возникает, если нет никаких моментов? Ответ: движение по циклоиде конца оси стремится к среднему стационарному движению, которое эквивалентно движению центра катящегося колеса, т. е. он устанавливается несколько ниже горизонтали. По этой причине собственный угловой момент гироскопа имеет небольшую вертикальную компоненту, которая в точности компенсирует момент количества движения прецессии. Как видите, ось должна немного опуститься, немного поддаться силе тяжести, чтобы иметь возможность крутиться вокруг вертикальной оси. Так работает гироскоп,
§ 4. Момент количества движения твердого тела
Прежде чем расстаться с вопросом о вращении в трехмерном пространстве, обсудим еще, хотя бы качественно, некоторые неочевидные явления, возникающие при трехмерных вращениях,
Главное из них: момент количества движения твердого тела не обязательно направлен в ту же сторону, что и угловая скорость. Рассмотрим колесо, прикрепленное наклонно к оси, однако ось по-прежнему проходит через его центр тяжести (фиг. 20.6).
Фиг. 20.6. Момент количества движения вращающегося тела не обязательно параллелен угловой скорости.
Если вращать колесо вокруг оси, то всем известно, что из-за наклонной посадки оно будет трясти подшипники. Качественно мы знаем, что при вращении на колесо должна действовать центробежная сила, которая старается оттянуть его массу подальше от оси. Она старается выпрямить плоскость колеса так, чтобы оно было перпендикулярно к оси. Чтобы уравновесить это стремление, в подшипниках должен возникнуть момент сил. Но если в подшипниках возникает момент сил, то должна быть какая-то скорость изменения момента количества движения. Как может изменяться момент количества движения, если колесо просто вращается вокруг оси? Предположим, что мы разбили угловую скорость w на компоненты w1 и w2 — перпендикулярную и параллельную плоскости колеса. Чему при этом будет равен момент количества движения? Так как моменты инерции относительно этих двух осей различны, то отношение компонент момента количества движения, которые (при таком частном выборе осей) равны произведениям моментов инерции на соответствующие компоненты угловых скоростей, отличается от отношения компонент угловой скорости. Поэтому вектор момента количества движения не направлен вдоль оси. Поворачивая вал, мы должны поворачивать и вектор момента количества движения, что приводит к возникновению момента силы, действующего на ось.
Момент инерции имеет еще одно очень важное и интересное свойство (я не буду доказывать его здесь, так как это очень сложно), которое легко описать и использовать. Наше предыдущее рассмотрение основано именно на этом свойстве. Оно состоит в следующем: любое твердое тело, даже неправильной формы, как, например, картошка, имеет такие три взаимно перпендикулярные проходящие через центр масс оси, что момент инерции относительно одной из них имеет наибольшую возможную величину из всех осей, проходящих через центр масс, а момент инерции относительно другой оси имеет наименьшую величину. Момент инерции относительно третьей имеет какую-то промежуточную величину между двумя первыми или равную одной из них. Эти оси, называемые главными осями тела, обладают тем важным свойством, что, если тело вращается вокруг одной из них, его момент количества движения имеет то же направление, что и угловая скорость. Если тело имеет оси симметрии, то направление главных осей совпадает с осями симметрии.
Если в качестве осей х, у и z выбрать главные оси тела и назвать соответствующие моменты инерции через А, В и С, то нетрудно подсчитать момент количества движения и кинетическую энергию вращения тела при любой угловой скорости w (фиг. 20.7).

Фиг. 20.7. Угловая скорость и момент количества движения твердого тела (А>В>С),

Разлагая w на компоненты wx, wy, и wг по осям х, у и z и используя направленные вдоль этих осей единичные векторы i, j, k, можно записать момент количества движения в виде

причем кинетическая энергия будет равна
* Что это действительно так, доказывается с помощью рассмотрения перемещения частиц твердого тела за бесконечно малый промежуток времени Dt. Это не самоочевидно, и я предоставляю тем, кто интересуется, доказать это.